

Instant positioning and map construction method suitable for dynamic environment
A map construction and dynamic environment technology, applied in 3D modeling, image enhancement, image analysis, etc., can solve the problems of high memory usage and difficult real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
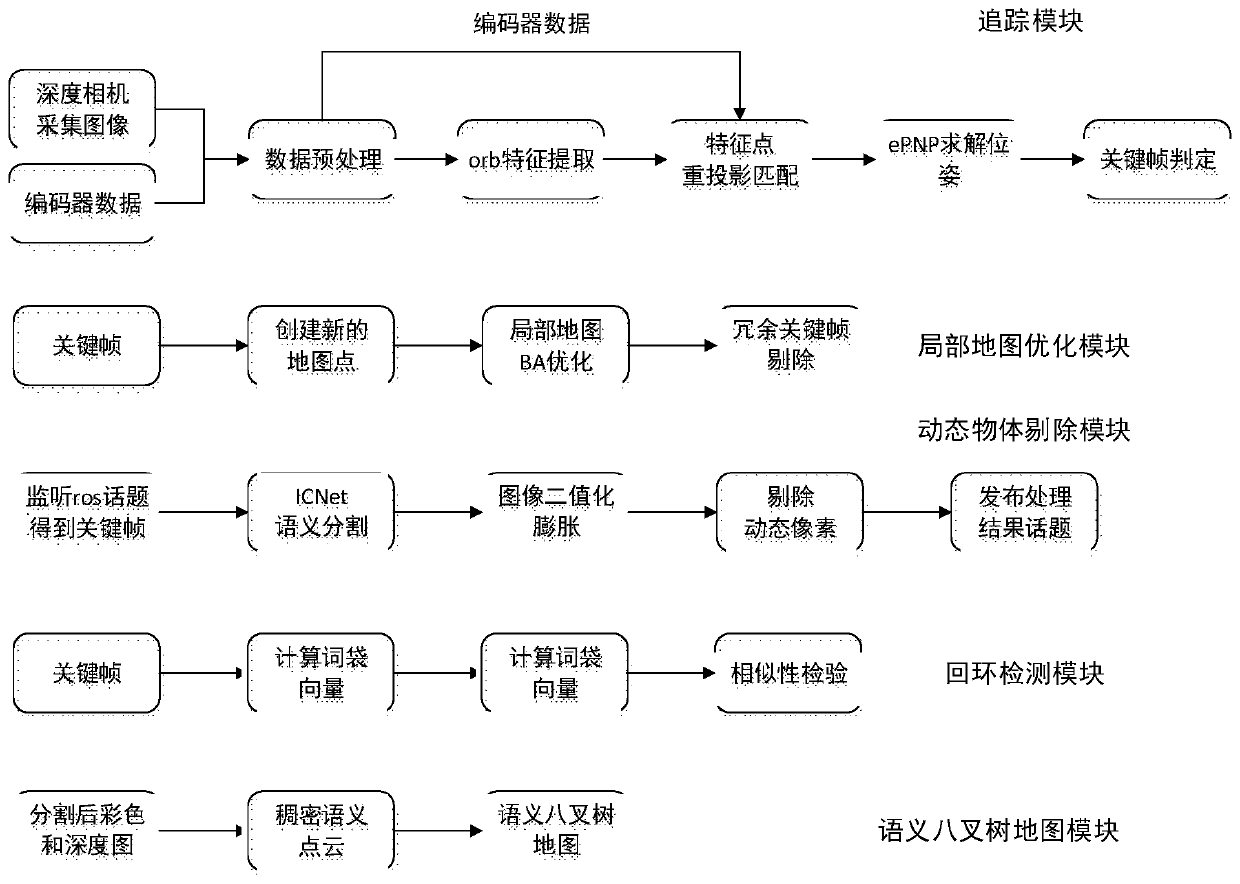
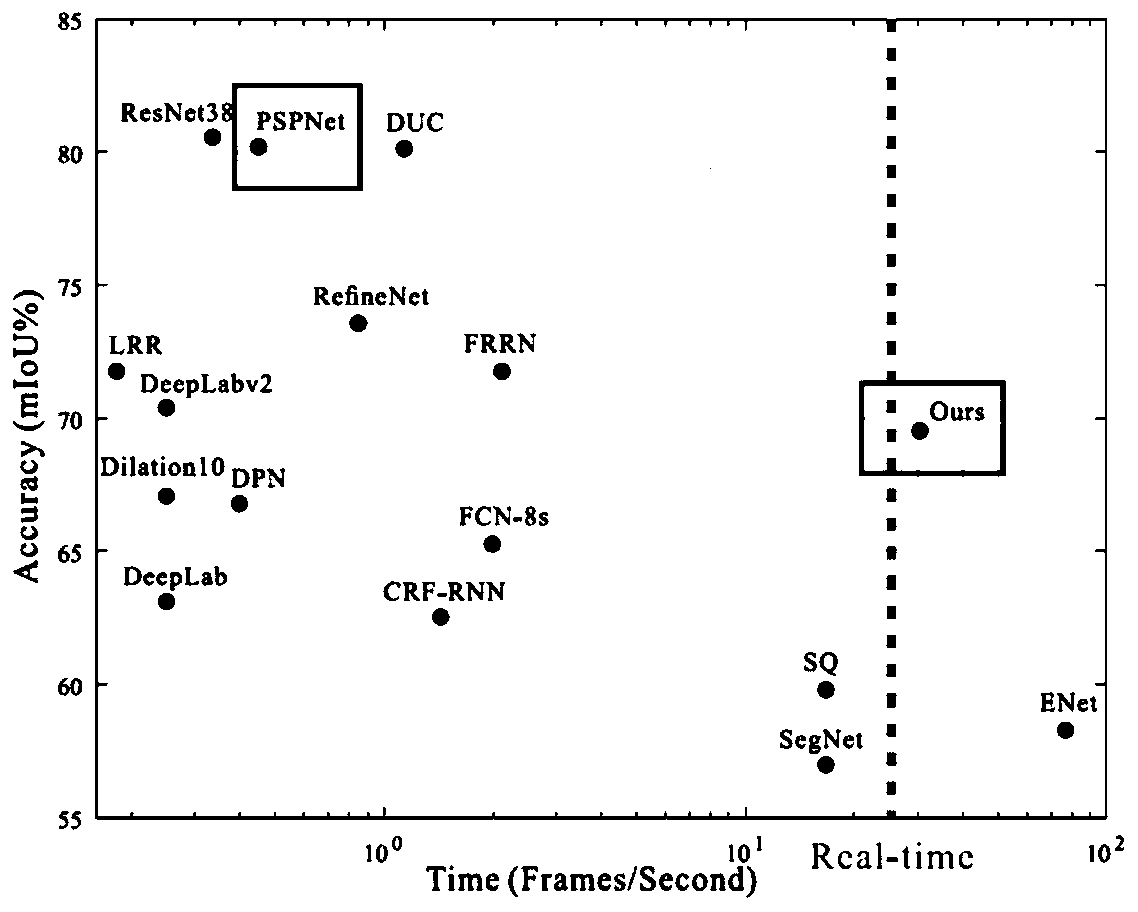
[0057] The present invention proposes a real-time positioning and map construction method suitable for dynamic environments. On the basis of the DS_SLAM system, the encoder data is incorporated to make the tracking part in the dynamic environment more robust, and only for the key frame part Carry out image segmentation, and use the image segmentation results only for the mapping part, which greatly shortens the time; in addition, it also innovatively combines the semantic segmentation network on the TensorFlow platform. Compared with the semantic segmentation network under the traditional caffe framework, the new network It has better performance; the new network introduces the multi-node communication mechanism of the ros system, and opens up a node thread for semantic s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More