

Neural network output feedback adaptive robust control method based on transmitting platform
An adaptive robust, neural network technology, applied in the field of servo control of launch platform motors, can solve problems such as difficulty in obtaining the true value of state quantities, achieve excellent control performance and increase robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
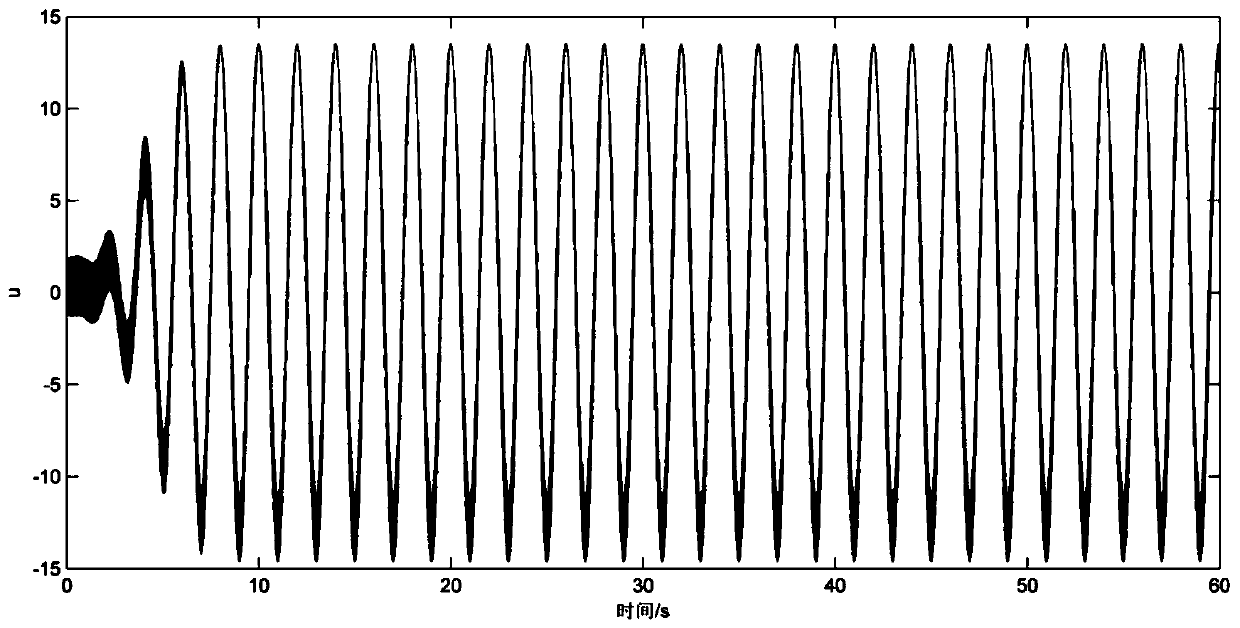
[0109] The simulation parameters are: inertial load parameter J eq =0.01kg·m 2 , torque amplification factor k u =5, viscous friction coefficient B eq =1.025N·s / m, constant interference d n =1.525N.m, the pitch and azimuth coupling coefficient c 1 =0.14N.m(rad / s),c 2 =0.13N.m(rad / s), time-varying interference upper bound δ=0.6N·m; The upper bound of δ 2 =0.3N.m; θ min = [0, 0.002, 0.22] T ; θ max =[0.215, 0.01, 0.3] T ; Time-varying interference f(t)=0.5sin(0.5πt)(N m); Position motion equation θ=0.1sin(πt)[1-exp(-0.01t)](rad) in pitch direction; position angle input Signal Take observer parameter kd=20, k=400, kp=200, ko=1.1; F=diag[10,10], controller parameter k 1 =50,k 2 =1,,λ 0 =200,λ 1 =1500,λ 2 = 2000; θ 1n = 300; θ 2n = 20, the selected nominal value of θ is far from the true value of the parameter, in order to examine the effect of the adaptive control law.
[0110] from above Figure 4-Figure 11 It can be seen that the present invention uses the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More