

Cleaning robot and multi-region cleaning method thereof
A cleaning robot, multi-area technology, applied in cleaning machinery, cleaning equipment, machine parts, etc., can solve the problems of low cleaning efficiency, poor user experience, waste of battery life resources, etc., to achieve high cleaning efficiency, strong battery life, and user experience. Good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
other Embodiment approach
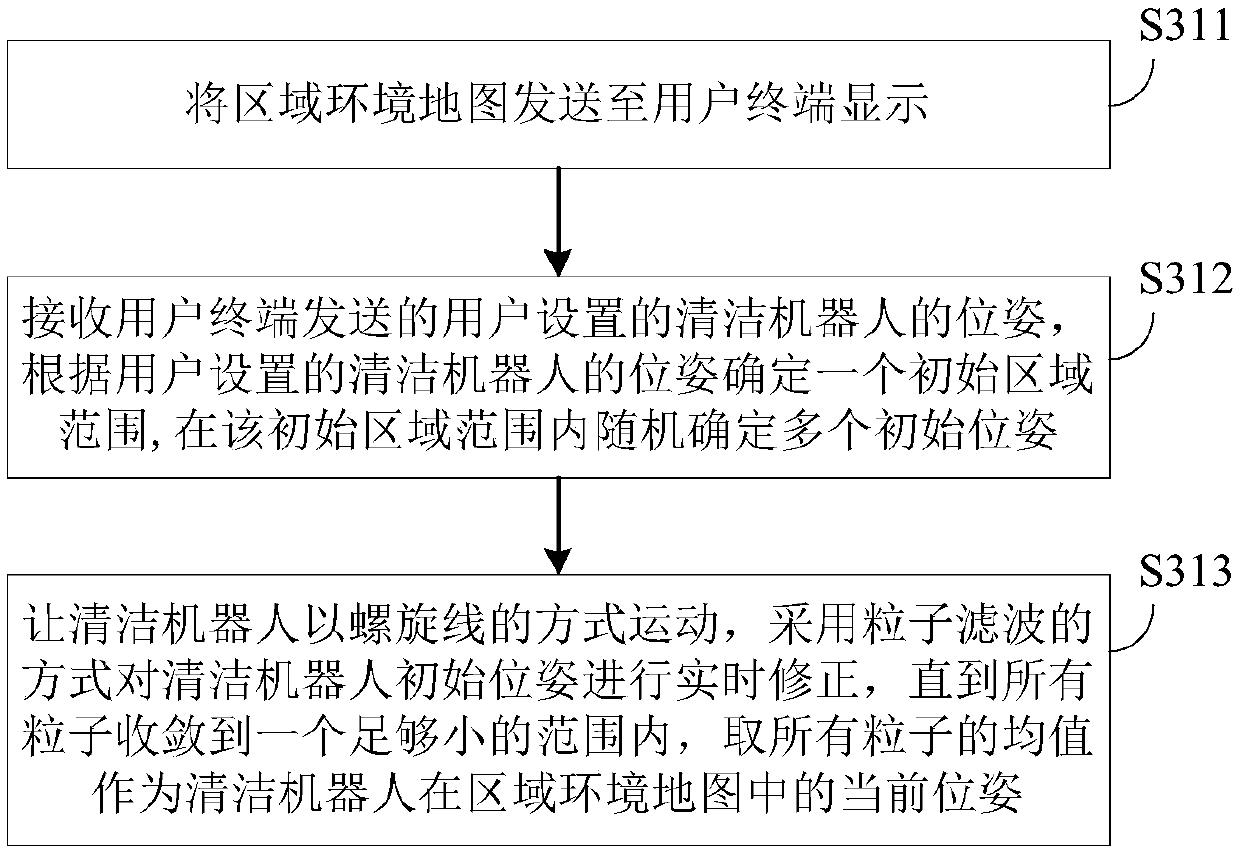
[0124] In other implementations, the image information corresponding to the coordinates of each point on the regional environmental map is also obtained while obtaining the regional environmental map. Assuming that N initial poses are determined within the initial region according to the poses set by the user, the execution of the relocation algorithm The process includes:
[0125] Step S361, controlling the cleaning robot to rotate (for example, to move outward in a helical manner).
[0126] Step S362, acquire image information during exercise, and proceed to step S363.
[0127]Step S363, for the image information acquired within the first predetermined stroke (such as 1 meter) of each movement of the cleaning robot, match it with the image information corresponding to each initial pose, and count the number of successful initial poses. The number of successful initial poses is equal to the predetermined threshold (such as 1), then execute step S364, if the number of success...
specific Embodiment
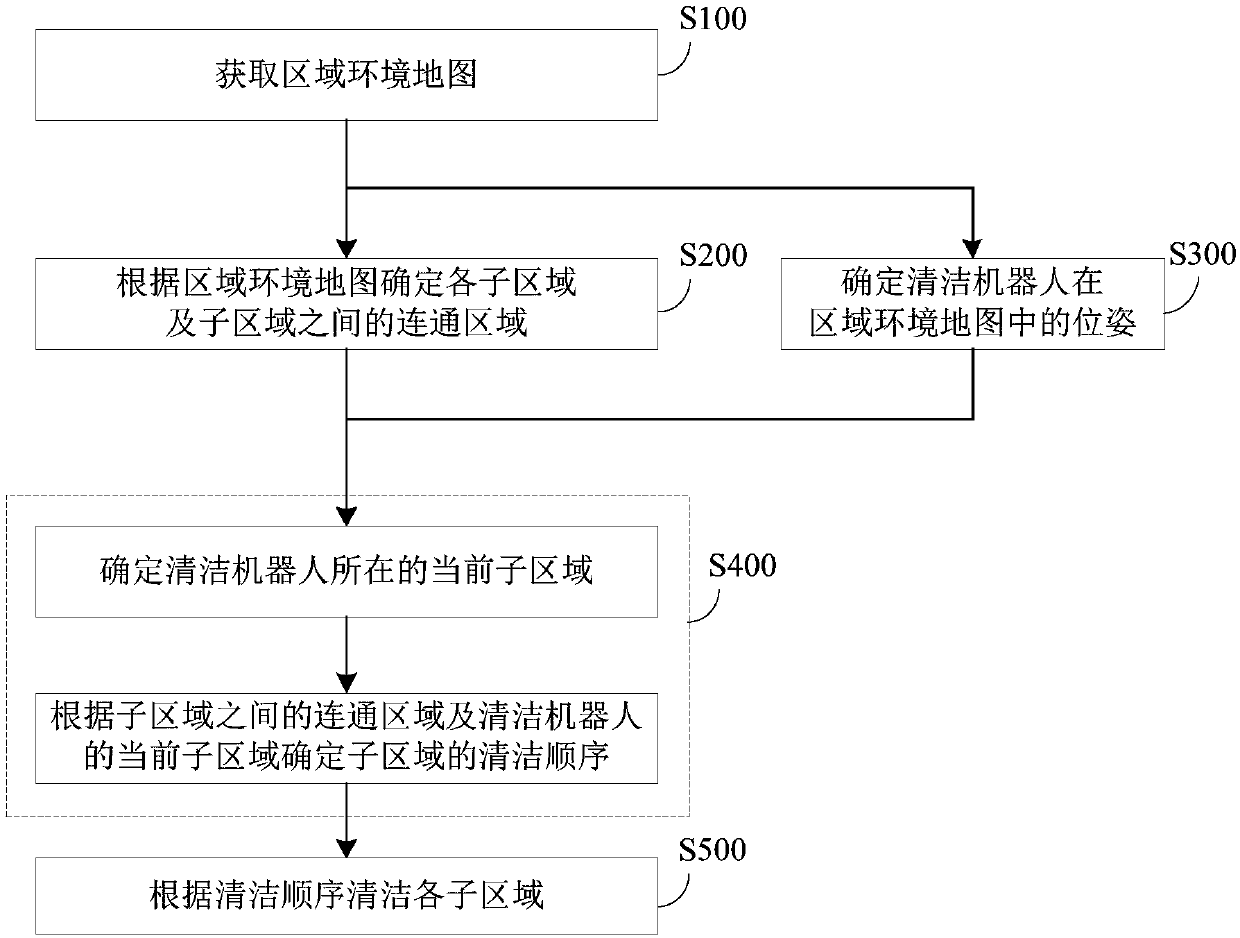
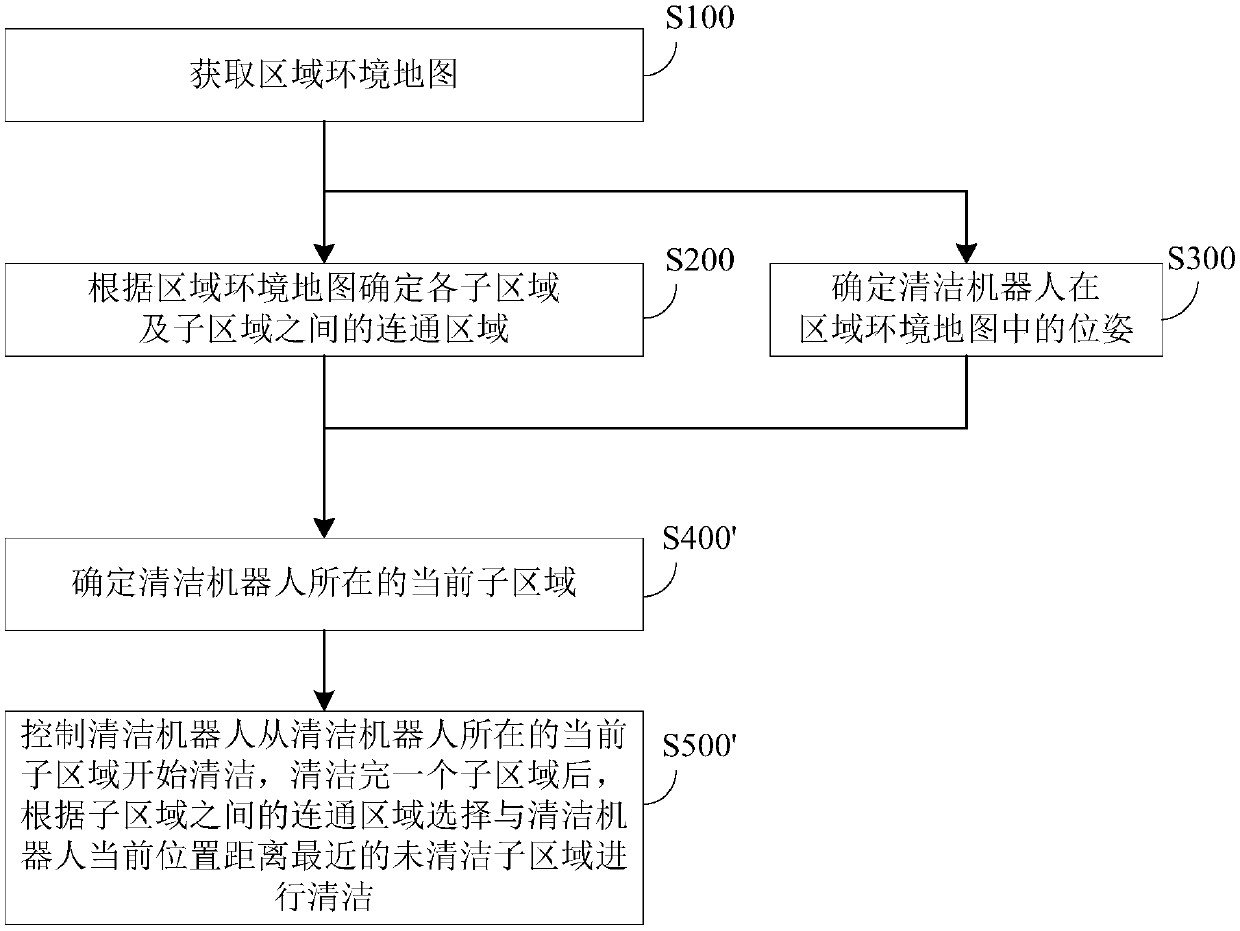
[0176] A specific embodiment of the present invention: the cleaning robot stores as Figure 9a As shown in the regional environmental map, the multi-regional cleaning process of the cleaning robot includes:
[0177] Step S910: After the cleaning robot is started, it first inquires whether there is an area environment map, and sends a prompt interface to the user terminal APP (cleaning robot management APP) after querying the existence of the area environment map. The prompt interface is used to prompt the user whether to use the area environment map. The terminal receives an instruction input by the user to use the regional environment map, and sends the instruction to the cleaning robot.
[0178] Step S920: The cleaning robot has a built-in geometric map segmentation algorithm, which divides the regional environment map into multiple sub-regions, such as Figure 9b As shown in , the dotted line is the dividing line, and the solid line is the boundary line that the cleaning r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More