

A method and device for auv multi-source information fusion based on factor graph
A multi-source information fusion and multi-source information technology, applied in the field of AUV multi-source information fusion based on factor graph, can solve the problems of asynchronous update frequency and short-term failure of navigation information sources, and achieve good flexibility and scalability, The effect of reducing calculation load and improving navigation performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
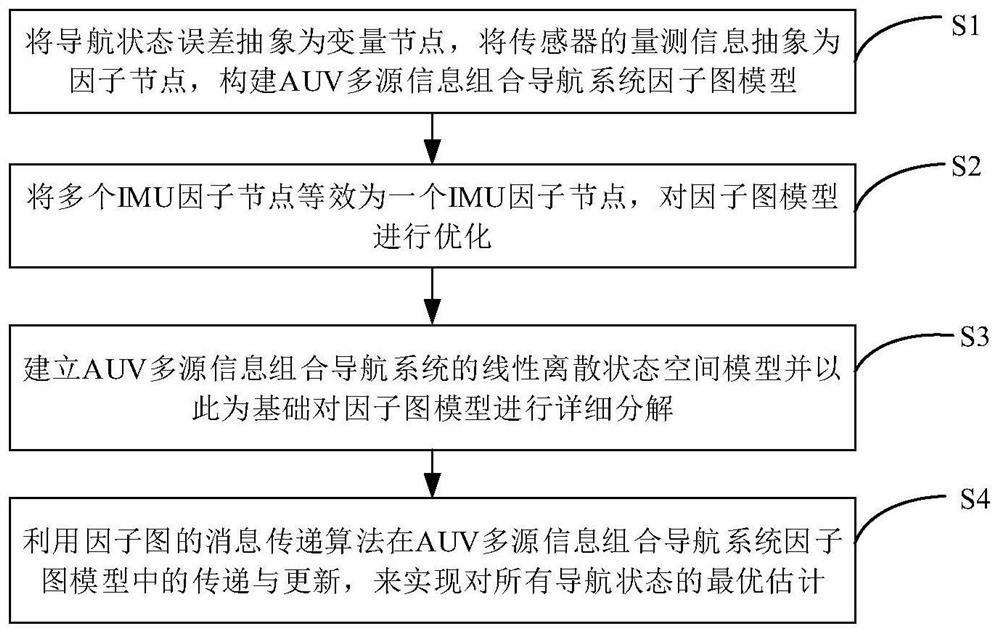
[0022] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. The embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
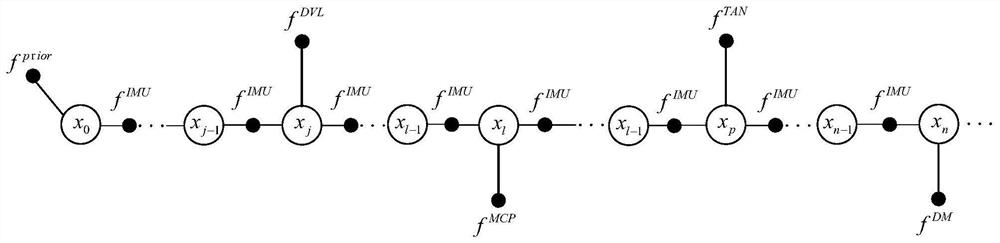
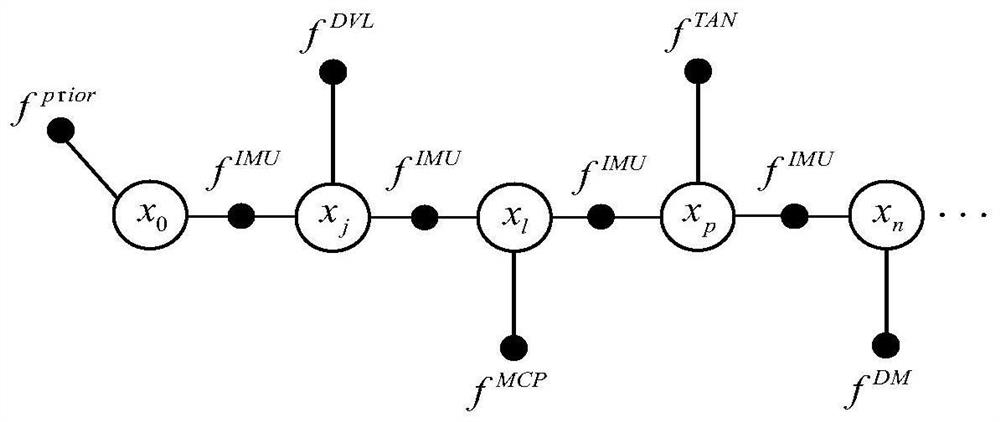
[0023] In recent years, driven by the demand for all-source navigation, the factor graph method provides a new idea for the information fusion of navigation systems. As a probabilistic graphical model, the factor graph method can visualize the relationship between variables in abstract mathematical problems, and then transform the complex calculation process into message passing and updating on the factor graph to complete the problem solving. A factor graph is a two-way graph model G=(F, X, E) used to express the joint probability distribution of random variables. It includes two types of nodes: one is the factor node f i ∈F, refers to the local function in factorization; the other type is the variable node x j ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More