

A torque feedforward control system and method
A feed-forward control and torque technology, applied in the field of robotics, can solve the problems that the control accuracy of the robot cannot be guaranteed, the tracking accuracy of the robot joint position and the response speed are difficult to be guaranteed, and achieve the effect of improving the dynamic response characteristics and improving the control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
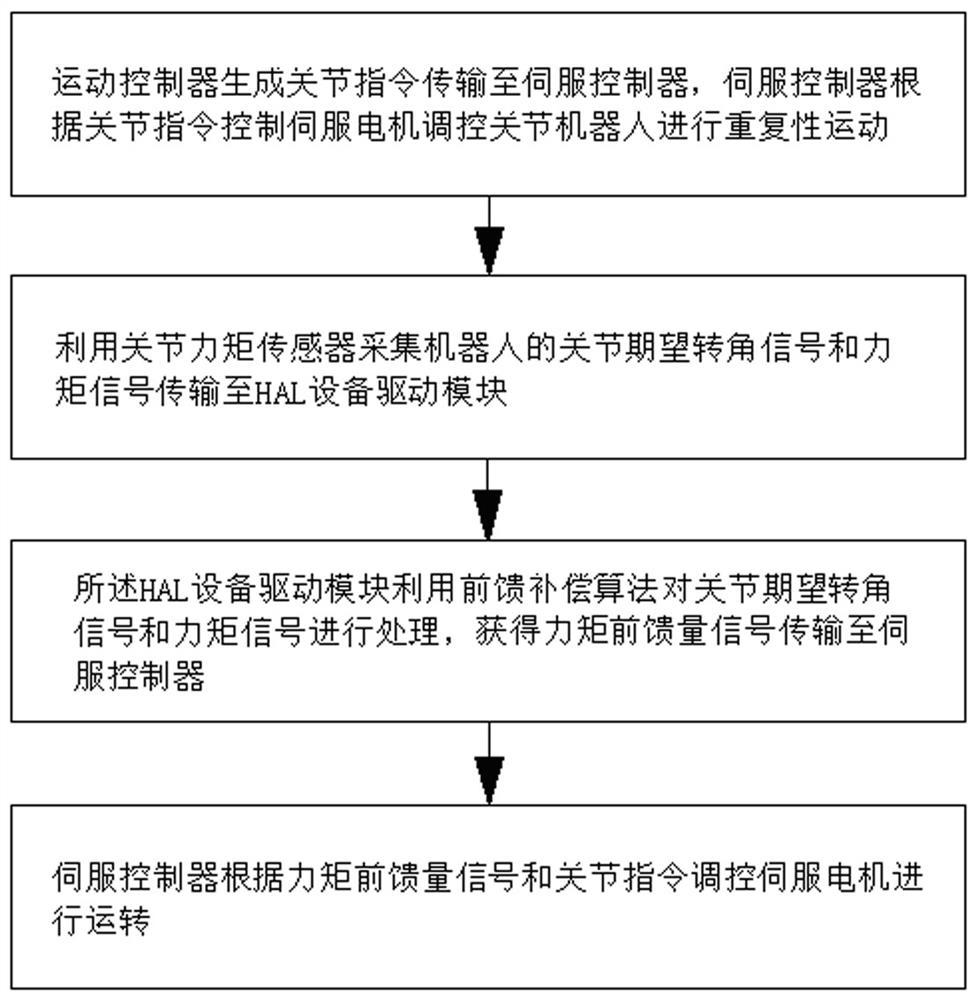
[0044] Such as figure 1 As shown, a torque feedforward control method includes the following steps:
[0045] Step 1. The motion controller 1 generates joint instructions and transmits them to the servo controller 3 through the HAL device driver module 2, and the servo controller 3 controls the servo motor 4 to regulate the joint robot to perform repetitive motion according to the joint instructions;
[0046] Step 2. Utilize the joint torque sensor 5 to collect the joint expected rotation angle signal and torque signal of the robot during the movement, and transmit the collected joint expected rotation angle signal and torque signal to the HAL device driver module 2;
[0047] Step 3. The HAL device driver module 2 uses a feed-forward compensation algorithm to process the joint expected rotation angle signal and torque signal, and obtains a torque feed-forward signal and transmits it to the servo controller 3;
[0048] Step 4. The servo controller 3 controls the servo motor 4 t...
Embodiment 2
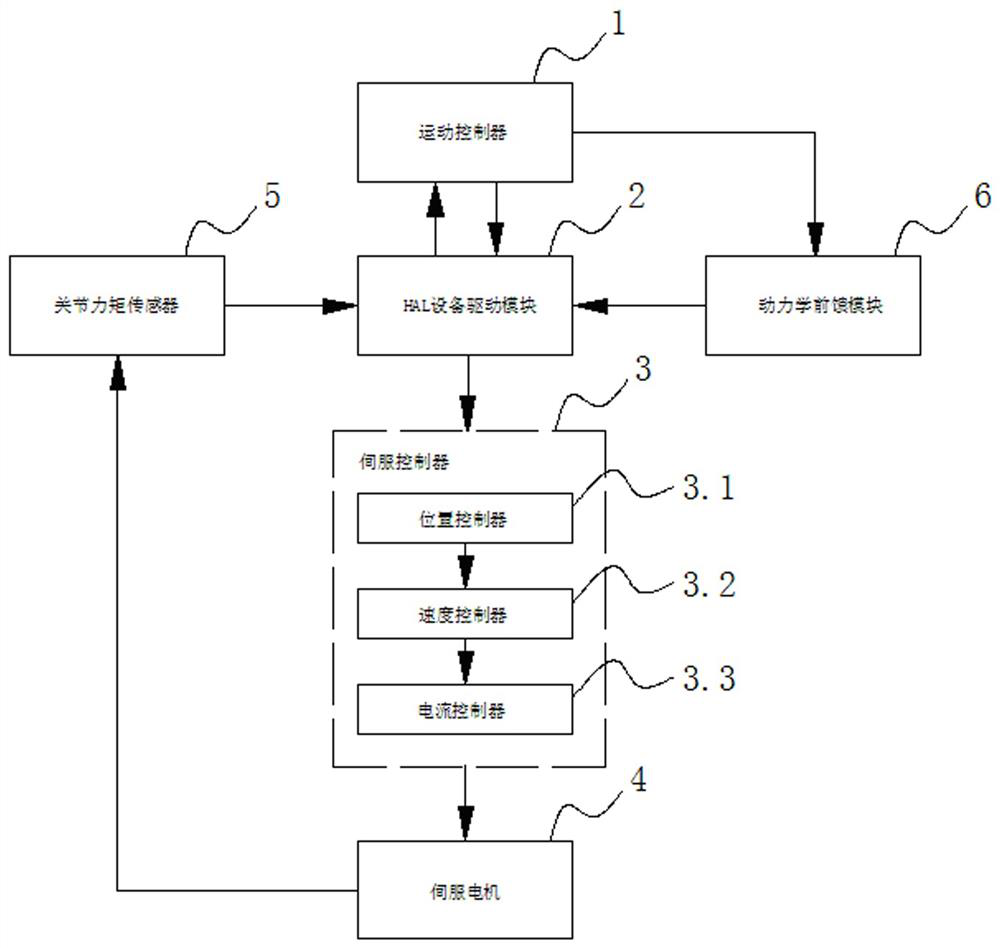
[0073] Such as figure 2 As shown, a torque feedforward control system includes a motion controller 1, a HAL device driver module 2 and a joint torque sensor 5;
[0074] The motion controller 1 is used to generate joint commands, and transmit the joint commands to the HAL device driver module 2;
[0075] The HAL device driver module 2 transmits the joint command to the servo controller 3; it is also used to process the joint expected rotation angle signal and torque signal by using the feedforward compensation algorithm, and obtain the torque feedforward signal and transmit it to the servo controller 3;
[0076] The servo controller 3 is used to control the servo motor 4 to control the joint robot to perform repetitive motion according to the joint command; it is also used to control the servo motor 4 to run according to the torque feedforward signal and the joint command.
[0077] The joint torque sensor 5 is used to collect the joint expected rotation angle signal and torqu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More