

A teleoperation system and control method that can coordinately control the single-leg operation and body translation of a multi-legged robot
A multi-legged robot and operating system technology, applied in the field of improving the controllability and adaptability of the multi-legged robot remote operating system, can solve the problems of insufficient controllability and environmental adaptability, and achieve the improvement of work space and working ability, high The effect of location tracking accuracy, heriliac transparency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0022] Specific implementation mode 1: A teleoperation system that can coordinately control the single-leg operation and body translation of a multi-legged robot described in this embodiment first needs to determine the teleoperation scheme of the system, the teleoperation scheme of the multi-legged robot in an obstacle environment Including: designing the overall control process, mapping method and force feedback mode of the teleoperation system, the overall control process of the teleoperation system is designed based on different work scenarios and task requirements; the teleoperation mode of the system adopts multi-master single In the slave control mode, one master robot is responsible for controlling the body translation of the slave robot, and the other master robot is responsible for controlling the displacement of the end of the slave robot’s operable legs. In this mode, the teleoperation system can realize multi-legged robots The coordinated regulation of single-leg m...
specific Embodiment approach 2
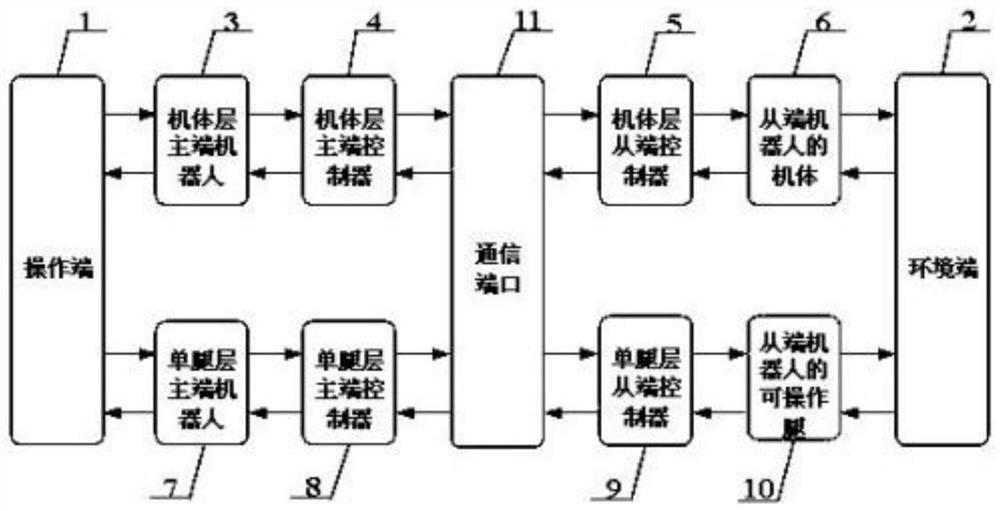
[0023] Specific implementation mode 2: A kind of teleoperating system described in this embodiment mode can cooperatively control the single-leg operation and body translation of a multi-legged robot. Single-leg layer teleoperation subsystem; refer to attached figure 1 The composition of the multi-legged robot teleoperation system shown in the figure specifically includes the operation terminal 1 and the environment terminal 2, the main-end robot 3 on the body layer, the master-end controller 4 on the body layer, the slave-end controller 5 on the body layer, and the body 6 of the slave-end robot. , the single-leg layer master robot 7 , the single-leg layer master controller 8 , the single-leg layer slave controller 9 , the operable legs 10 and the communication port 11 of the slave robot.
specific Embodiment approach 3
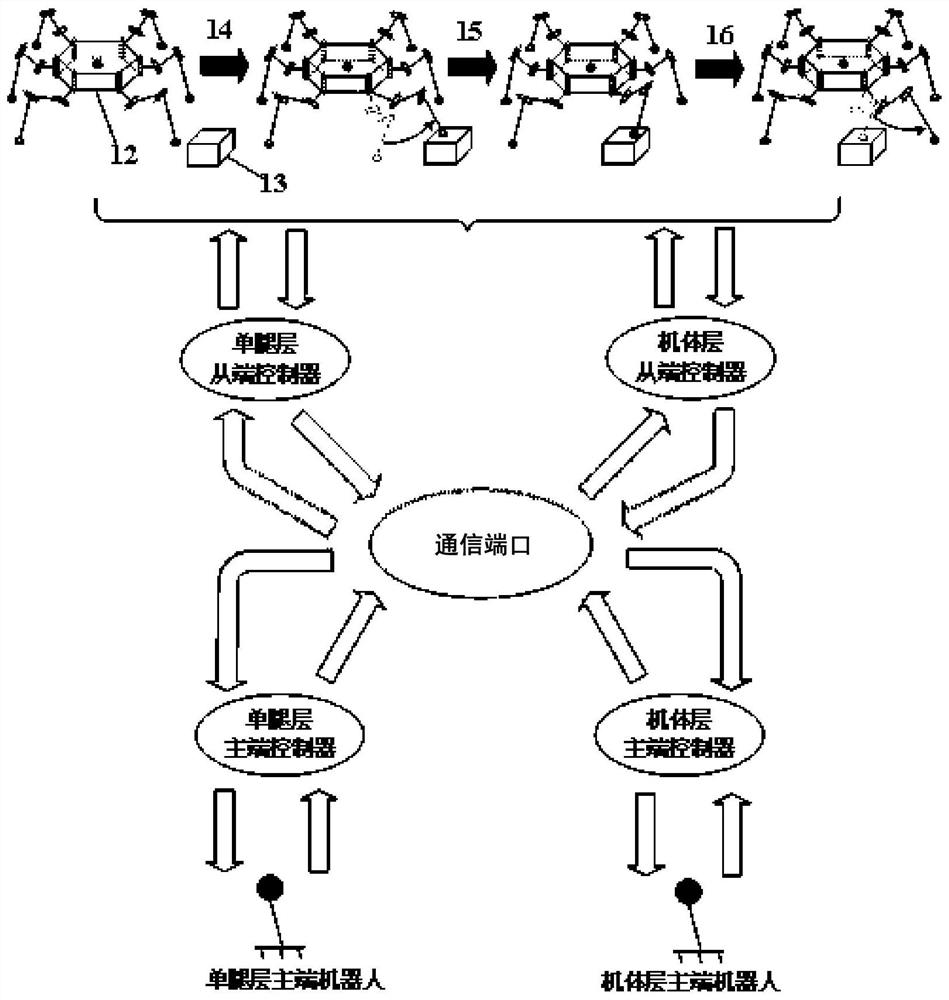
[0024] Specific embodiment 3: This embodiment is to further explain the overall control process of the teleoperation system of a multi-legged robot that can coordinately regulate the single-leg operation and body translation described in specific embodiment 1. In this embodiment, refer to attached figure 2 The overall control flow of the multi-legged robot teleoperation system shown can be described according to three working scenarios: Scenario 14: When there is a local surmountable obstacle in the working space of the slave robot 12, the operation at this time The operator can manually intervene on the operable legs of the slave robot through the single-leg layer master robot, and control it to interact with the target obstacle 13 according to the operator's intention; Scene 15: When the operable leg of the slave robot is in the After the surface of the body is solid, since the leg is far away from the self-planned target foothold point, the slave robot 12 needs to maintain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More