

Navigation operation system, registration method thereof and electronic equipment
A surgical system and navigation system technology, applied in the field of navigation surgery system and its registration method and electronic equipment, can solve the problems of poor reliability and real-time performance, influence of position accuracy, low precision of mechanical arm, etc., so as to ensure reliability and real-time performance , reduce the chance of infection, and simplify the surgical procedure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
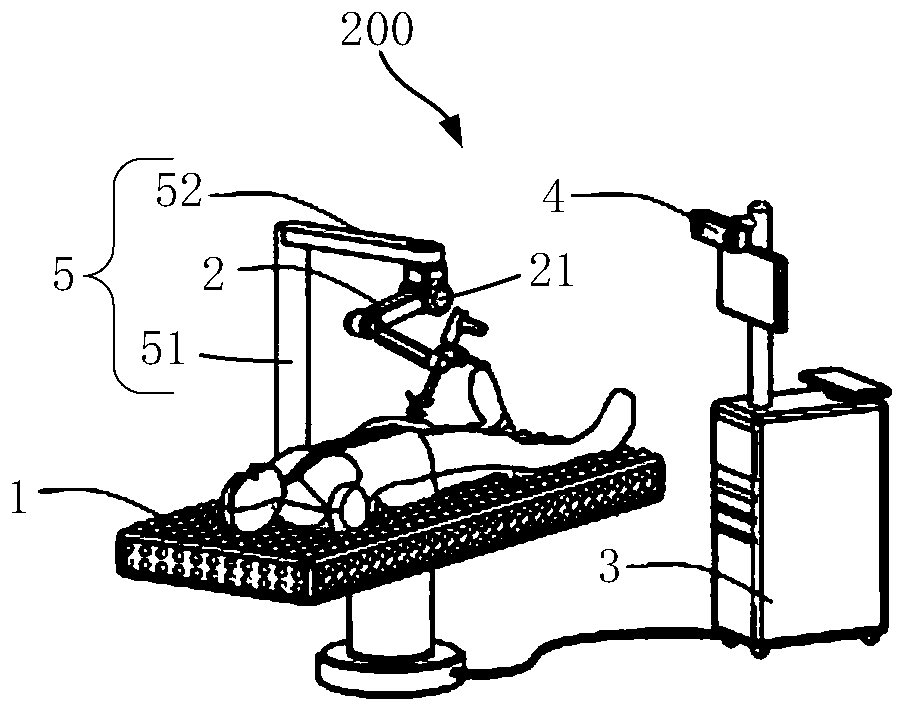
[0068] figure 2 It is a schematic structural diagram of the navigation surgery system 200 according to Embodiment 1 of the present invention. Such as figure 2 As shown, the present embodiment provides a navigation surgery system 200, which includes a robot system and a navigation system connected in communication. Described robot system comprises mechanical arm 2, and the end of described mechanical arm 2 is used for installing surgical instrument, and surgical instrument can be any surgical instrument that is suitable for robot system to use, for example clamp, flanging device, reaming device, impactor device or humeral head impactor, etc.
[0069] The navigation system includes an optical navigation tracking device 4 and a plurality of optical markers that can be identified by the optical navigation tracking device 4 . In this embodiment, a plurality of said optical markers are installed on a support device 1 (such as a hospital bed), and the positions of these optical ...
Embodiment 2
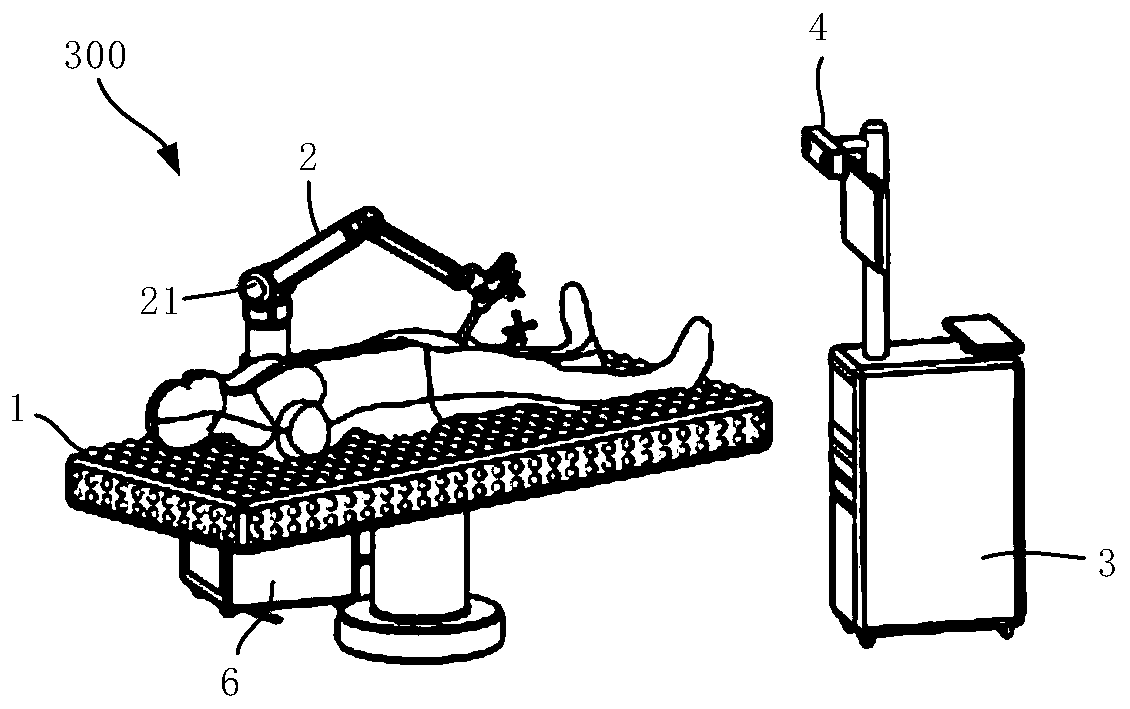
[0079] image 3 and Figure 4 They are structural schematic diagrams of the navigation surgery system 300 provided in Embodiment 2 of the present invention in different orientations. The structure of the navigation surgery system 300 provided in this embodiment is basically the same as that of the navigation surgery system 200 in the first embodiment, and the following description will mainly focus on the differences between the two.
[0080] Such as image 3 and Figure 4 As shown, the navigation surgery system 300 of this embodiment also includes a surgical trolley 6, and the robotic arm 2 is directly fixed on the surgical trolley 6, and the position of the surgical trolley 6 relative to the supporting device 1 is fixed and known. Based on the same principle, since the position of the base joint 21 of the manipulator 2 relative to the operating trolley 1 is fixed and known, the position of the base coordinate system of the manipulator relative to the support device 1 is a...
Embodiment 3
[0083] Figure 5 It is a schematic structural diagram of the navigation surgery system 400 provided by the third embodiment of the present invention. The structure of the navigation surgery system 400 provided in this embodiment is basically the same as that of the navigation surgery system 300 in the second embodiment, and the following description will mainly focus on the differences between the two.
[0084] The reference coordinate system of this embodiment is not established on the support device 1 , but on the operating trolley 6 . Such as Figure 5 As shown, an optical target 7 is set on the operating trolley 6, and there are usually at least three reflective spheres on an optical target 7, which is convenient for establishing a reference coordinate system based on a plurality of reflective spheres. Since the position of the operating trolley 6 relative to the support device 1 is fixed and known, the position of the reference coordinate system relative to the support ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More