

Special wheel-foot integrated hexapod robot based on OS wheels
A hexapod robot and robot technology, applied in the field of intelligent robots, can solve the problems of large size and complex structure, and achieve the effects of diverse functions, strong environmental adaptability, and fast leveling speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
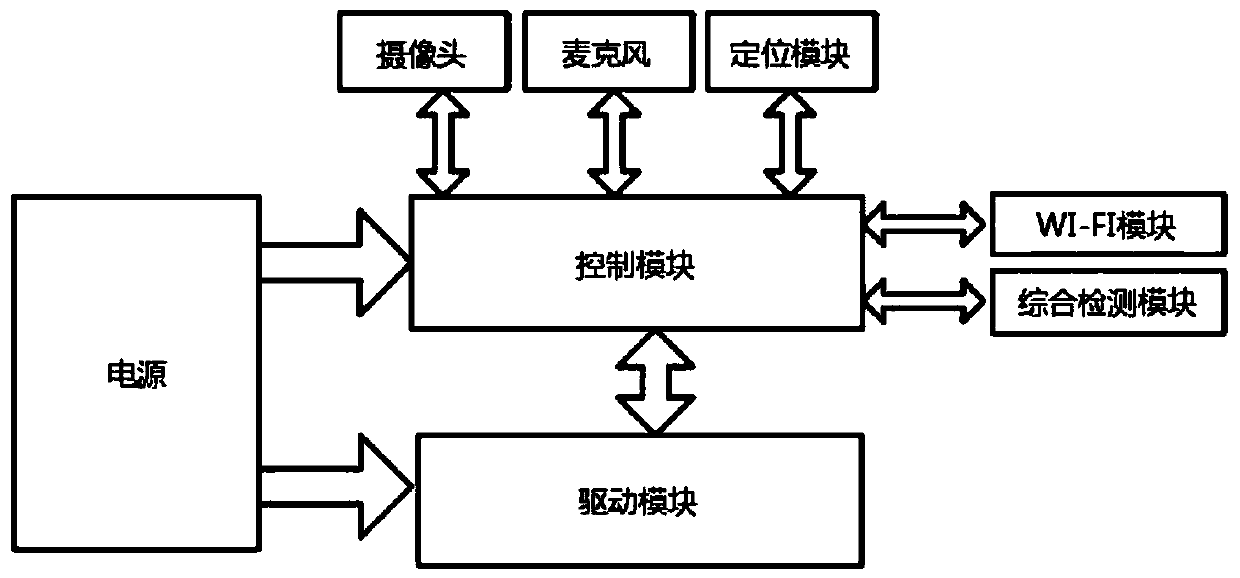
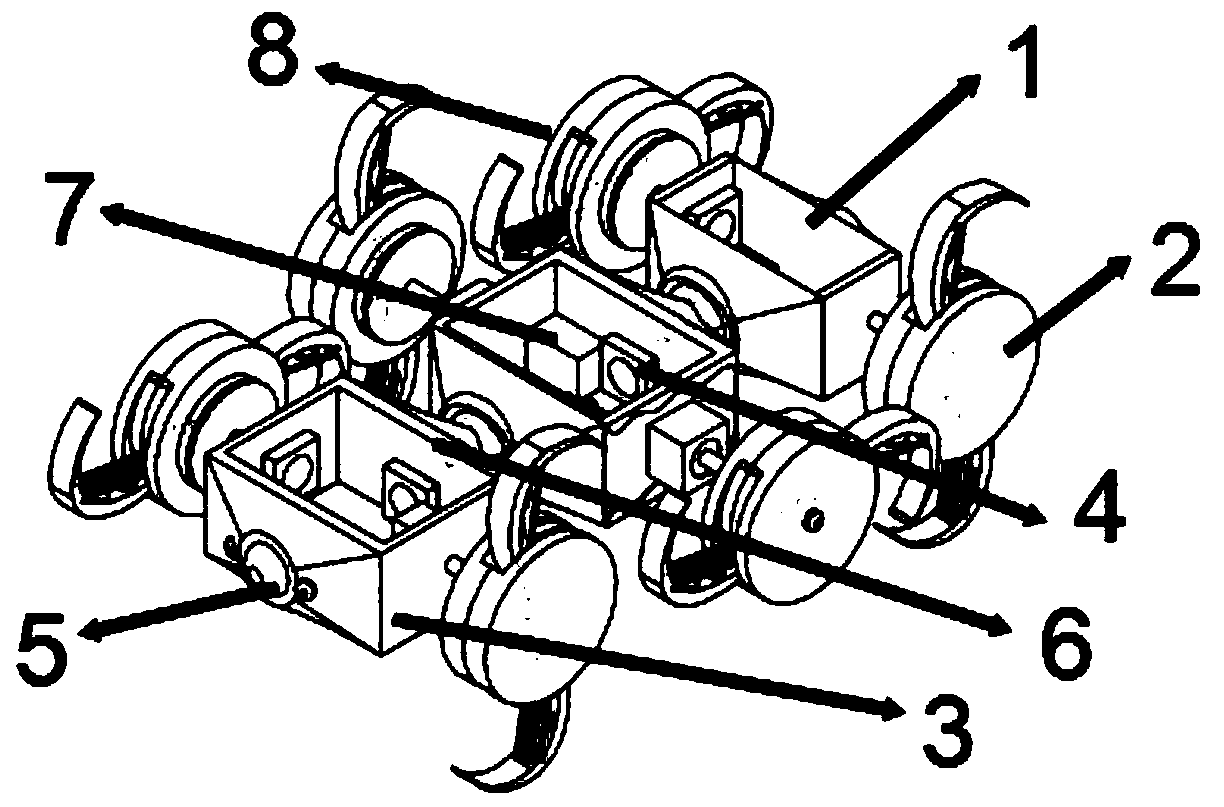
[0021] Such as figure 2 As shown, a special wheel-foot integrated special hexapod robot based on OS wheels is characterized in that it consists of a robot body, a vision system, a positioning module, a control module, a comprehensive detection module, a power supply module, and a storage module, specifically including a robot body 1 , robot foot 2, external metal protective frame 3, positioning module 4, camera 5, microphone 6, Wi-Fi module 7 and comprehensive detection module 8.
[0022] The hexapod robot body 1 is composed of a main frame, a controller 101 , a motor driver 102 , a motor 103 and a power module 104 . The foot 2 of the robot is fixedly connected to the robot body 1 in the axial direction, the external metal protective frame 3 is fixedly connected to the upper part of the robot body 1, and the positioning module 4 is fixed on the robot body 1, including the GPS system 401 and GY953 AHRS inertial sensors 402, they can send location information and motion status...
Embodiment 2
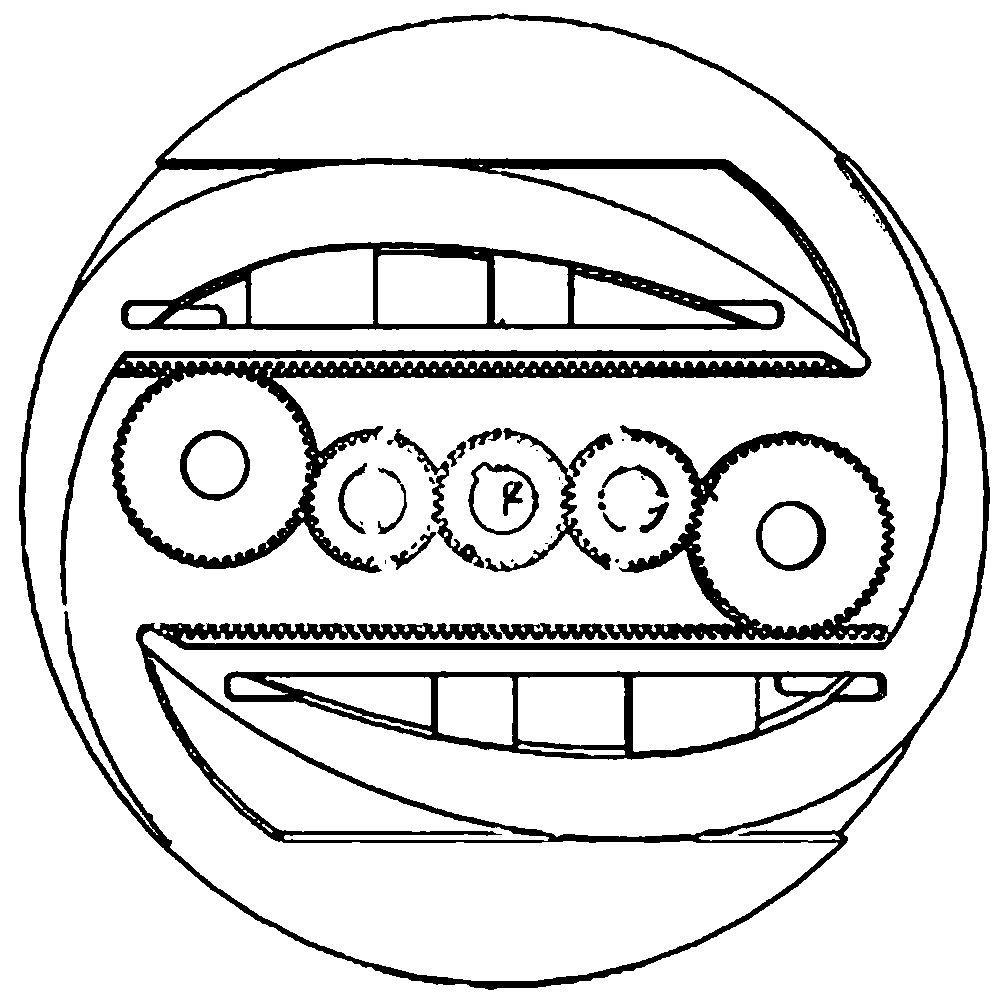
[0029] The overall relationship of the main components is shown in the figure. Each shaft is connected to a set of electric motors. Each motor drives the caster to rotate. Such as image 3 , 4 , each foot consists of a large wheel shaft, a group of vanes, a driving gear, two driven small gears, and two driven large gears. There is a small motor in the middle of the large wheel shaft, and the motor shaft is fixedly connected with the driving gear through a connecting piece for the contraction and extension of the blades. The driving gear and the driven pinion, the driven bull gear and the driven pinion, and the vanes are meshed and connected. The contraction and extension of the vane is more conducive to the robot to cross different obstacles. On flat ground, the foot is an O-wheel. When an obstacle is encountered, the small motor controls the driving gear to rotate clockwise, driving the driven pinion on the left to rotate counterclockwise, the driven pinion on the right ...
Embodiment 3
[0031] When the hexapod robot is placed in a closed interior space with stairs in front. Assuming this is a patrol in the hallway, the robot has to go upstairs and patrol the next floor. refer to figure 2 , press the switch to start the hexapod robot. Once the robot is activated, there are two control modes to choose from. One is automatic mode and the other is manual mode. Anyway, after the robot starts up, the battery will support all the motors and sensors. Different sensors are used to process the collected information. When the robot conducts security patrols, it can automatically switch the caster mode and move forward, backward, turn or stop according to the road conditions. When the robot detects a stair obstacle ahead, it slows down. Obstacles are judged by the program. If it can be crossed, the wheel structure will be converted into a foot structure, that is, the O-shaped wheel will be converted into an S-shaped wheel, which is convenient for climbing stairs....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More