Electromagnetic adsorption hexapod climbing robot
A robot and electromagnetic technology, applied in the field of robot research, can solve the problems of difficult control, use of many motors, and reliability needs to be improved, and achieve the effect of strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
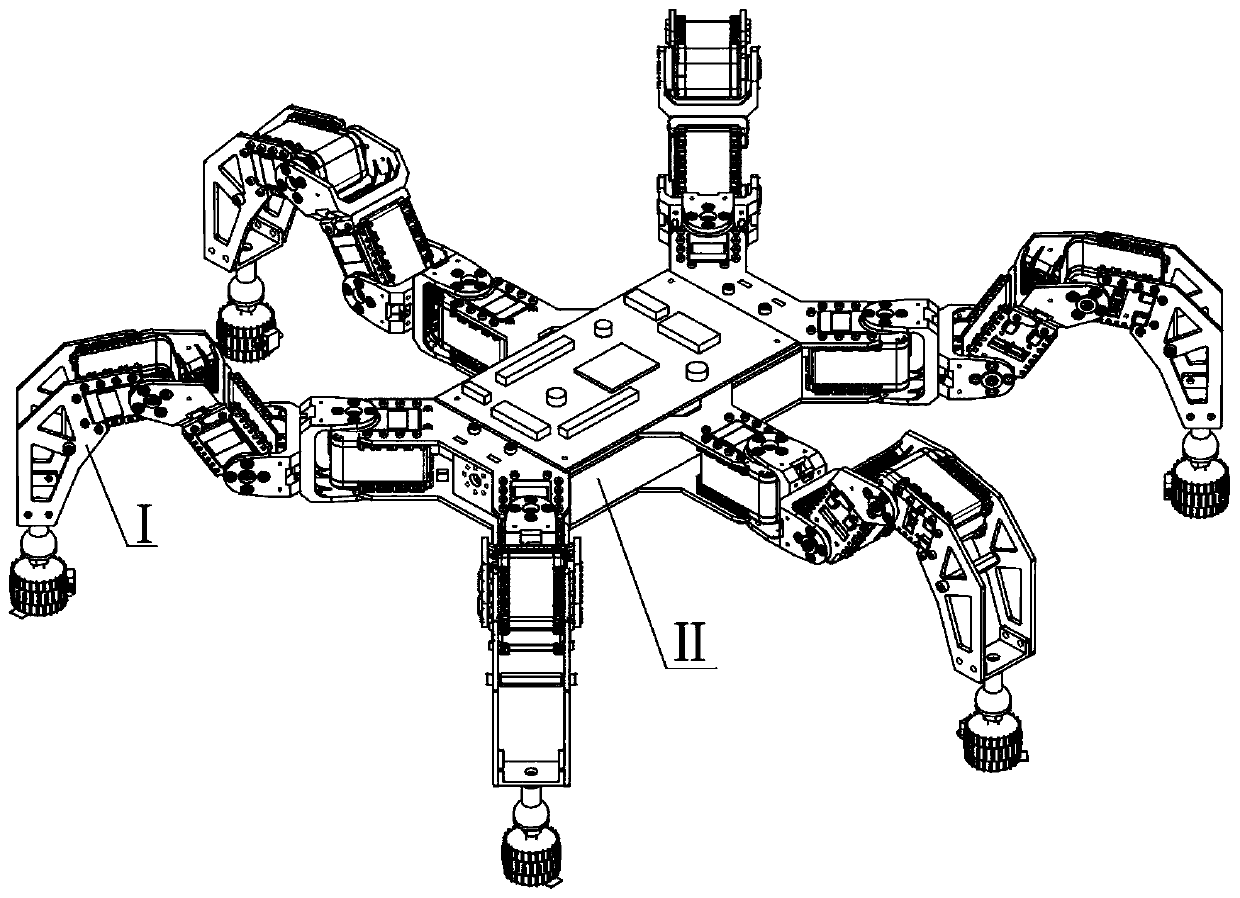
[0020] Below by embodiment, in conjunction with accompanying drawing, the technical scheme of the present invention is described further specifically, as figure 1 As shown, an electromagnetic adsorption hexapod climbing robot includes: leg mechanism Ⅰ and body part Ⅱ.
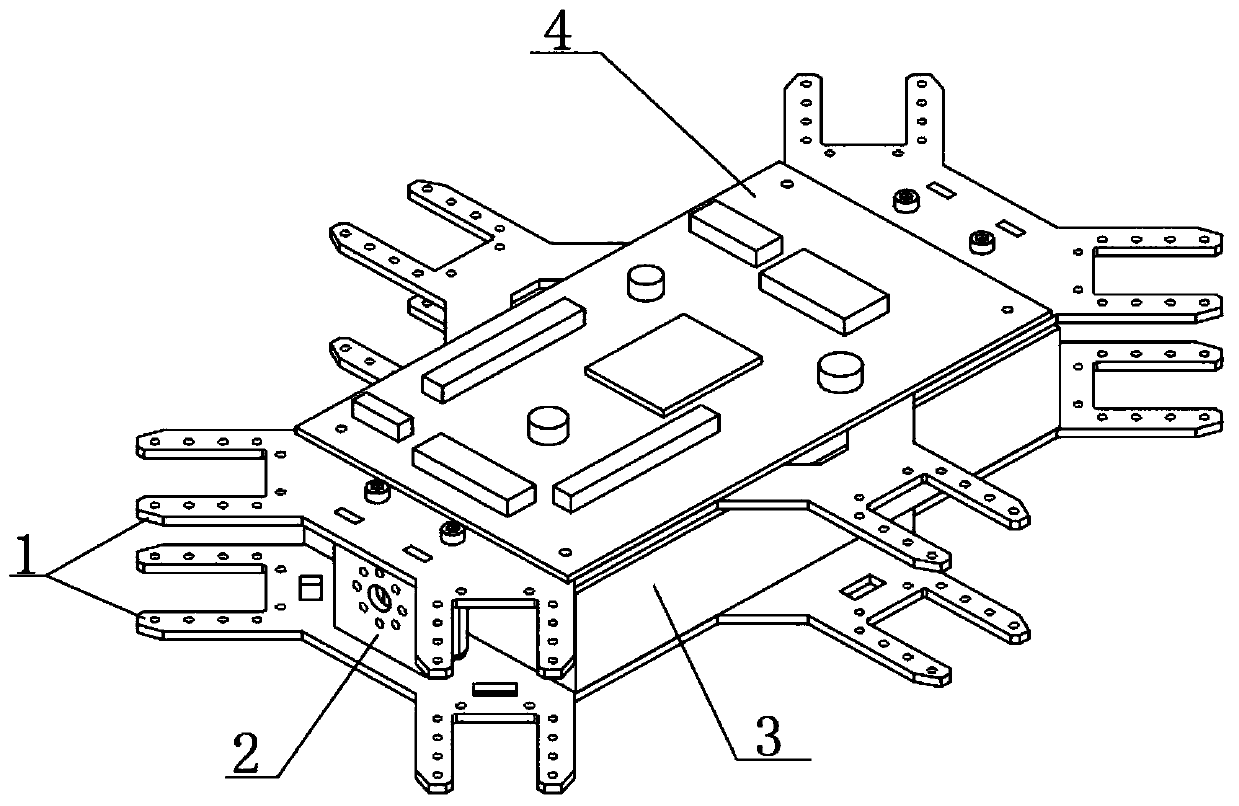
[0021] Such as figure 2 As shown, the body part II of the present invention includes: a body bracket 1 , a miniature wireless transmission camera 2 , a lithium battery pack 3 , and a controller part 4 . The body support 1 is the supporting skeleton of the robot body. The miniature wireless transmission camera 2 is installed on the front end of the body support 1 to facilitate viewing the terrain in front of the robot. The lithium battery pack 3 is installed in the middle of the body support 1 to lower the center of gravity of the robot. The controller part 4 is installed on the body The upper part of the bracket 1 is convenient for quick installation and debugging. Controller part 4 is the core part of robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com