

Robust adaptive repetitive control method for hydraulic servo system based on state estimation
A hydraulic servo system, robust self-adaptive technology, applied in the field of hydraulic servo control, can solve the problem of high bandwidth of the control law, achieve the effect of solving the problem of high bandwidth of the control law, broad application prospects, and good tracking performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
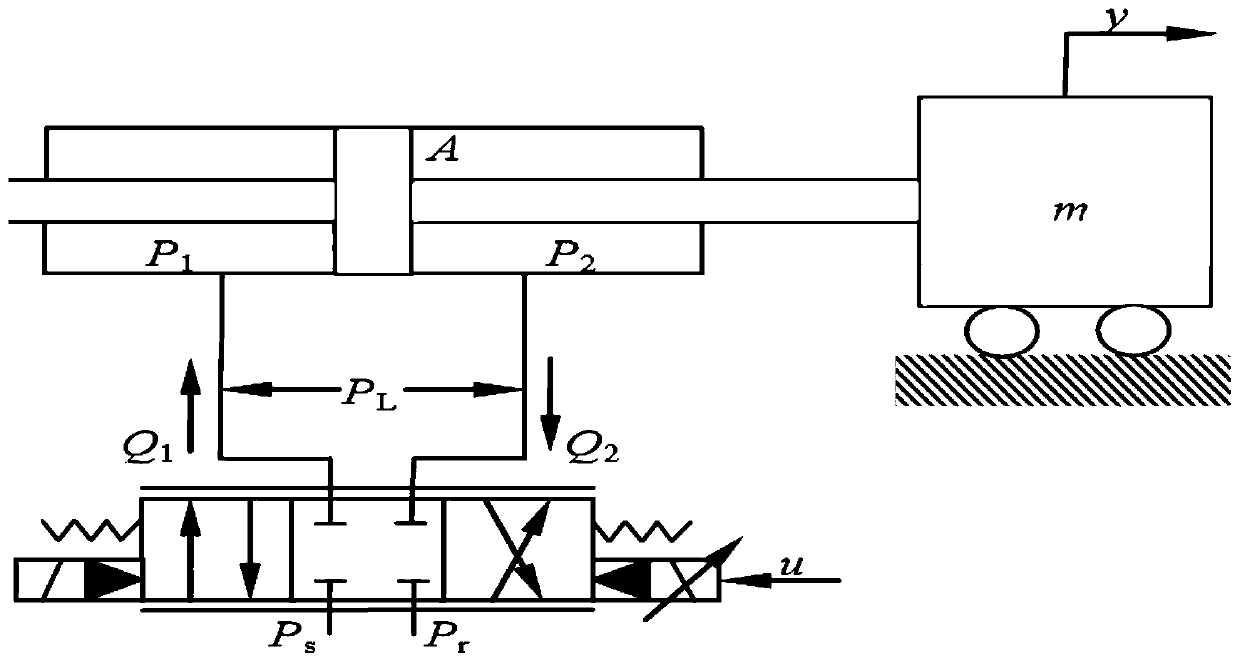
[0168] In order to assess the performance of the designed controller, the following parameters are taken in the simulation to model the hydraulic system:
[0169] m=40kg, B=4000, k t =1.18×10 -8 m 3 / s / V / Pa 1 / 2 , A=904.778mm 2 , V=3.98×10 - 5 m 3 , P s =12MPa, P r =0,β e =700Mpa,C t =3×10 -12 m 3 / s / Mpa.
[0170] Approximate Coulomb friction: A f =100Nm,S f (x 2 ) = arctan(900x 2 ).
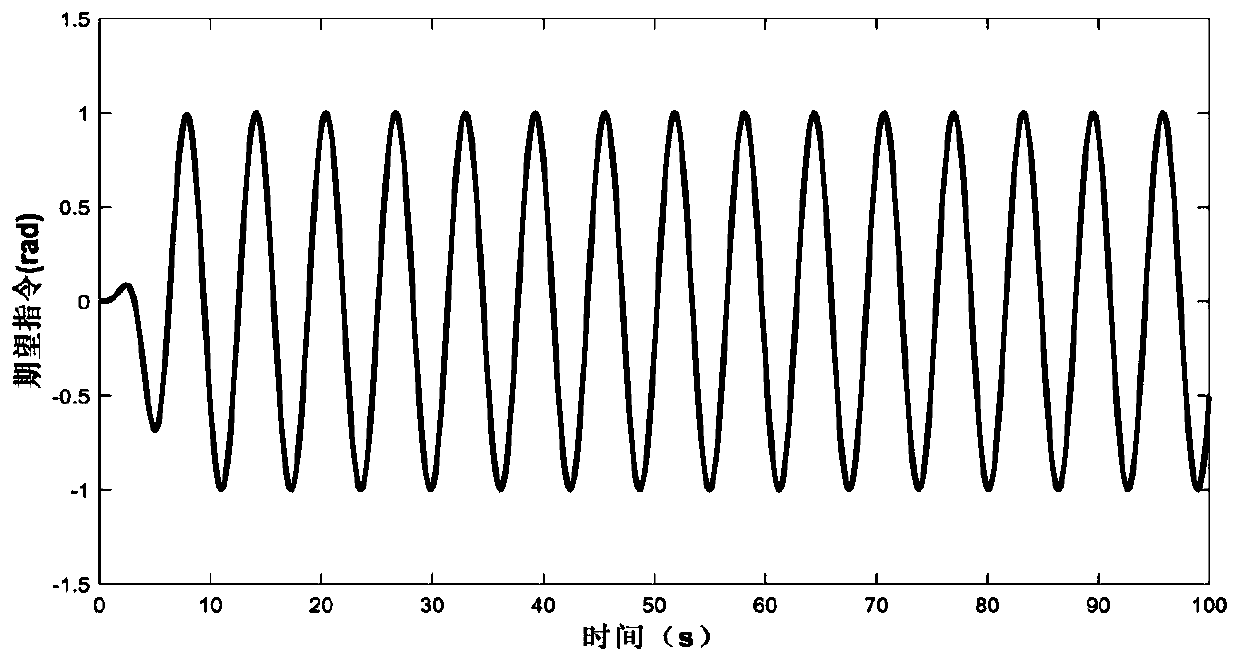
[0171] The desired instruction for a given system is: x 1d =0.02sin(t)[1-exp(0.01t 3 )] (rad).
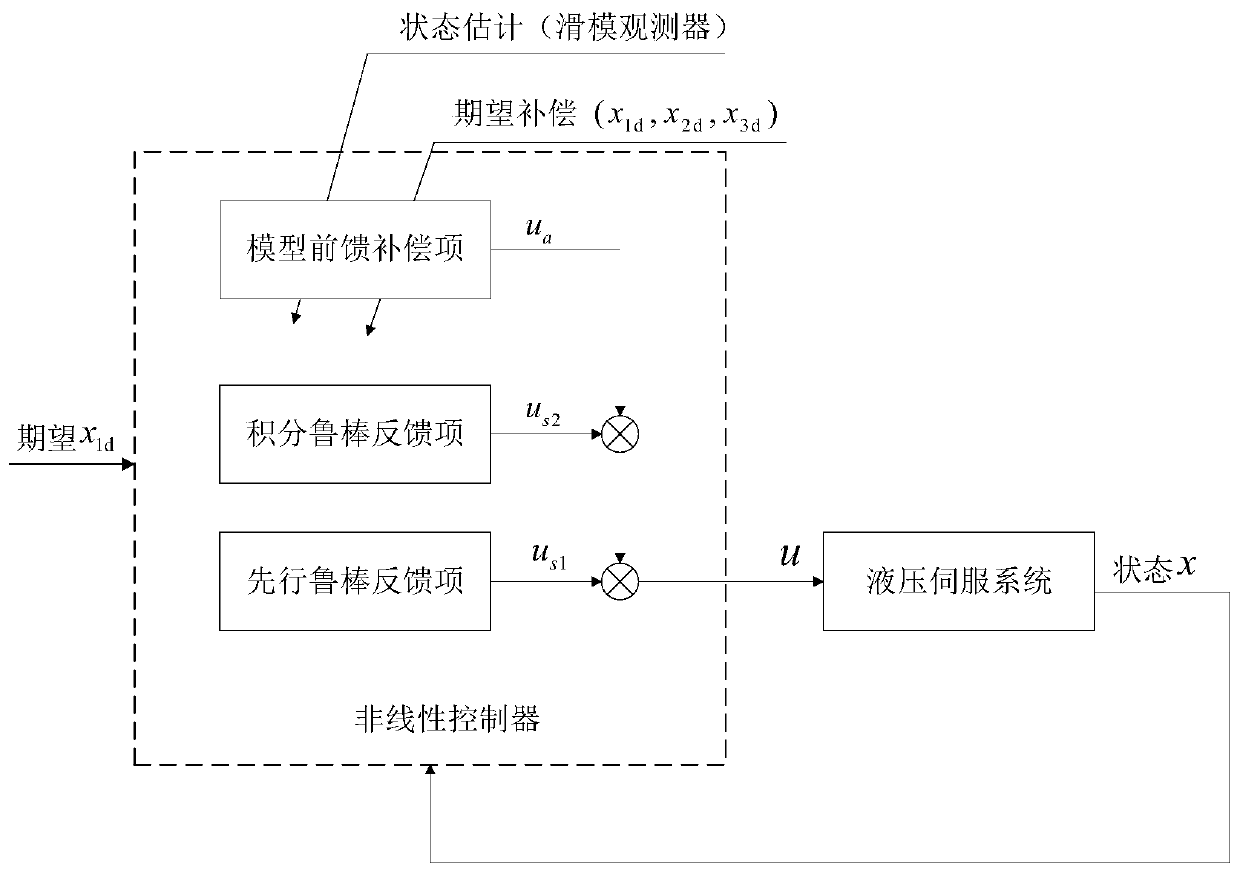
[0172] In the sliding mode observer of the estimated state: L=1,λ i ={12,8,5,3}, i=1,2,3,4.
[0173] Robust adaptive repetitive controller: its control gain is taken as k 1 =1500,k 2 =300,k 3 = 10, k r =10; m=2 in Fourier series expansion, unknown constant parameter adaptive gain in modeling uncertainty approximation Integral robust feedback gain β=10, θ 1 =mV t / (4β e Ak t ), θ 2 =A / k t +BC t / (Ak t ), θ 3 =C t m / (Ak t )+V t B / (4β e Ak t ) are nominal and kno...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More