

Improved three-dimensional point cloud registration method and system based on two-dimensional image guidance, and readable storage medium
A technology of 3D point cloud and 2D image, which is applied in image enhancement, image analysis, image data processing, etc. It can solve the problems of low precision and low efficiency of ICP registration calculation, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] Below in conjunction with accompanying drawing and embodiment the present invention will be further described
[0079] On the basis of the classic ICP algorithm, the present invention provides an improved ICP registration method based on RGB-D cameras to obtain depth images. The algorithm improves the calculation efficiency and accuracy, and can be widely used in 3D scene construction and robot 3D pose estimation. and other fields [1-2] .
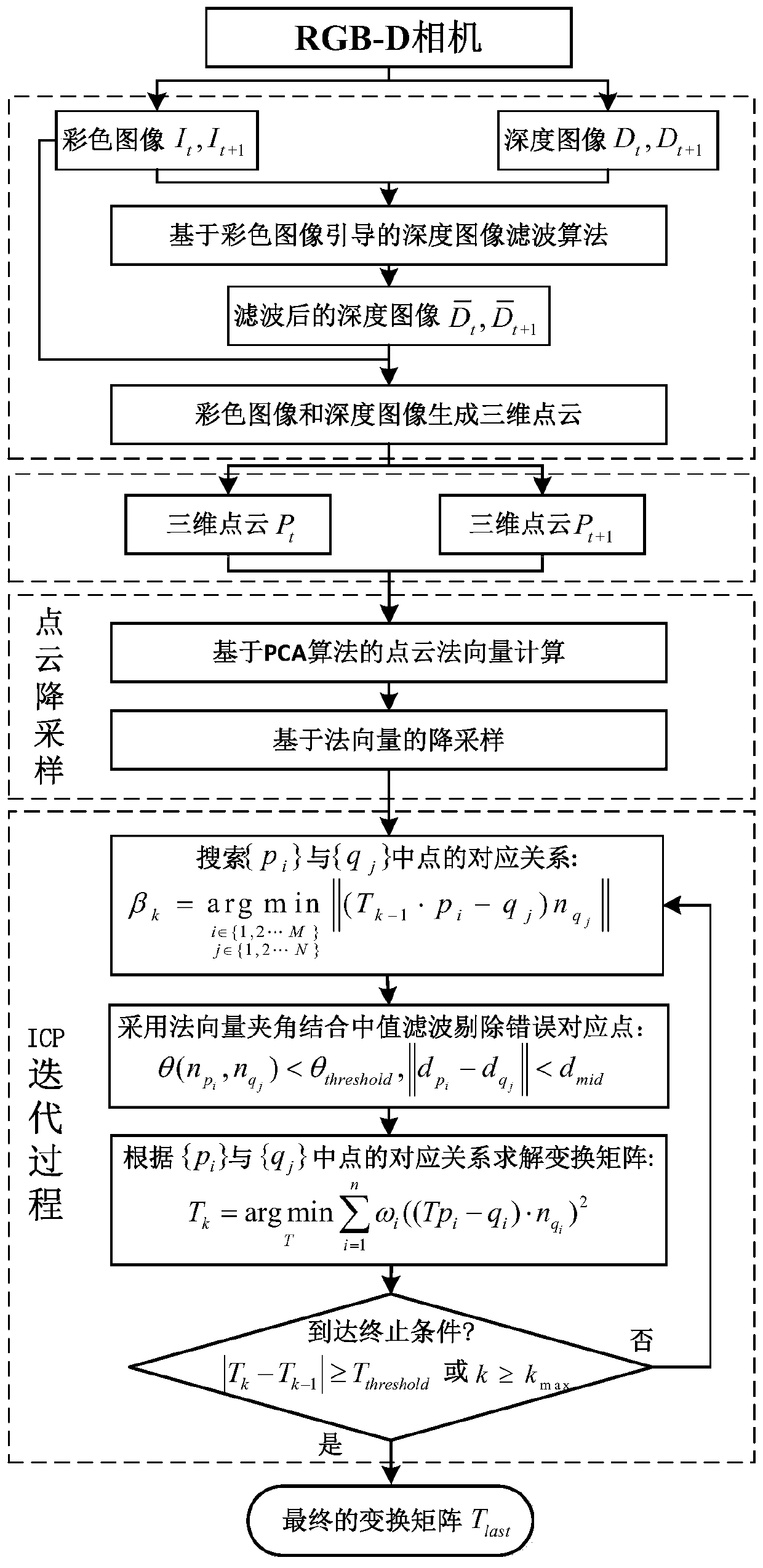
[0080] Such as figure 1 As shown, an improved ICP registration method based on RGB-D camera to obtain depth images, including the following steps:
[0081] Step 1: Obtain the two-dimensional color image I of the adjacent frame scene t , I t+1 and the corresponding depth image D t 、D t+1 ;
[0082] Use the RGB-D camera to acquire the two-dimensional color image I of the adjacent frame scene at time t and t+1 t and I t+1and a depth image D corresponding to the two-dimensional color image t and D t+1 ;
[0083] Step 2: Depth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More