

Nucleation distance fuzzy clustering orthogonal spectral imaging pose sensor calibration method
A technology of fuzzy clustering and distance, applied in the direction of instruments, image analysis, image data processing, etc., can solve the problems of large memory space, expression of local features, complex weight functions, etc., to meet the calibration requirements, improve calibration accuracy, and improve calibration efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
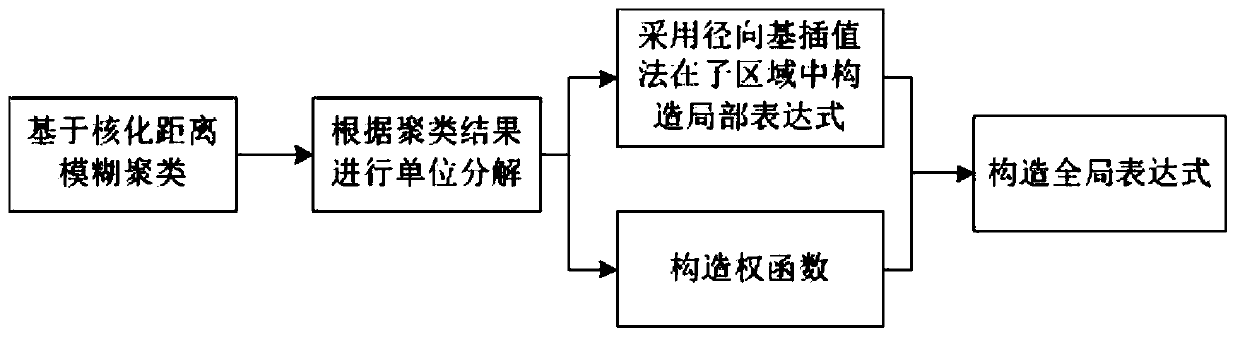
[0033] The invention is designed to solve the dense matrix problem that occurs when the radial basis interpolation method processes a large amount of scattered data, and realizes the calibration of the orthogonal spectroscopic imaging pose sensor. The calibration method introduces kernel fuzzy clustering algorithm to improve clustering accuracy and realize unit decomposition. The local compactly supported radial basis function proposed by Wu Zongmin is used to construct the weight function, and the global radial basis function is used to interpolate to obtain the local expression. Finally, the global expression is constructed through the weight function and the local expression.
[0034] The purpose of the present invention is to solve the dense matrix problem that occurs when the orthogonal spectroscopic imaging pose sensor uses a large amount of scattered data for interpolation calibration. The main idea of this method is: Step 1 uses the fuzzy clustering algorithm based on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More