

Robot singular configuration avoiding admittance control method, device and system
A control method and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as affecting human-computer interaction experience, discontinuous acceleration, instability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
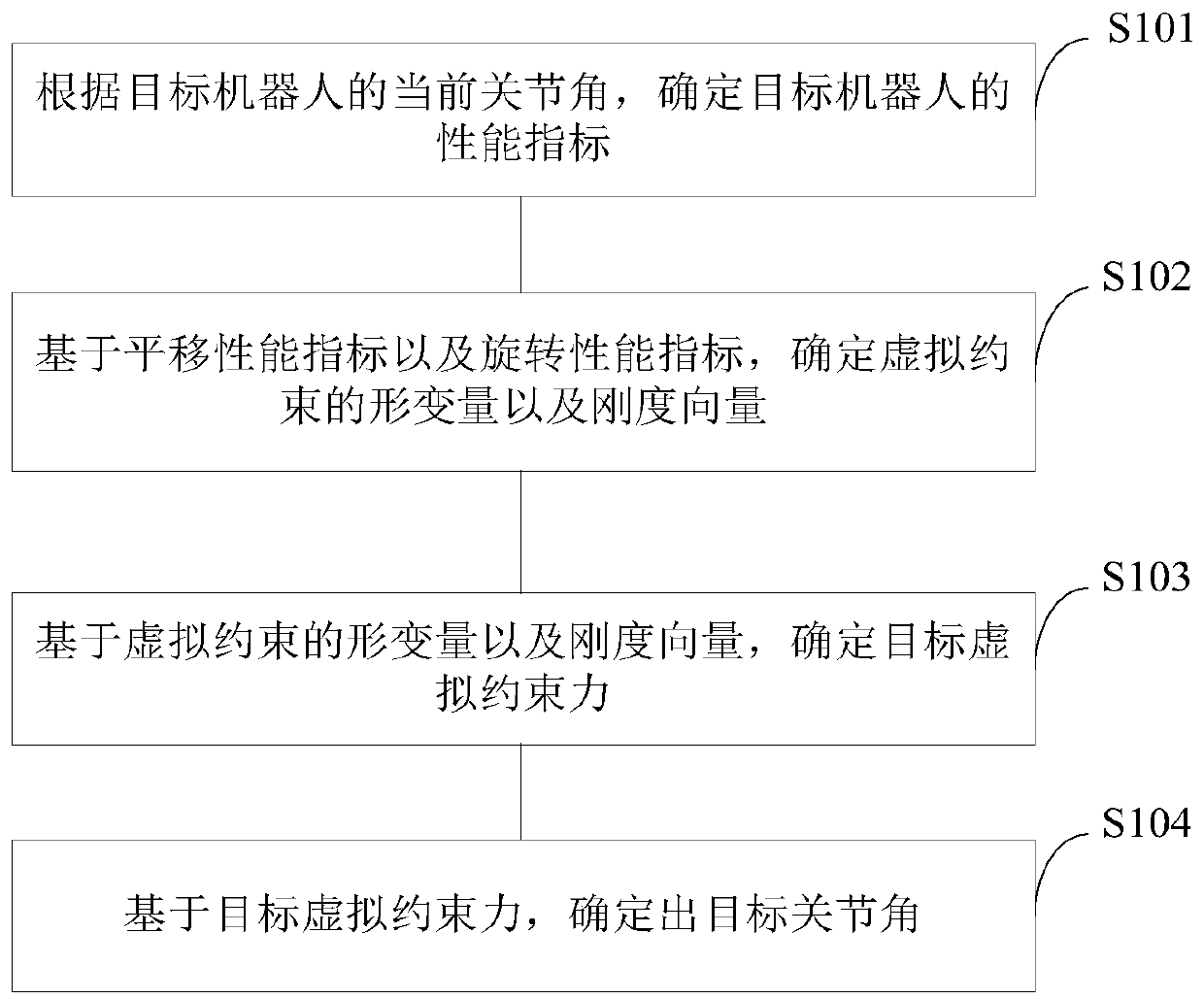
[0056] see figure 1 , figure 1 It is a schematic flowchart of a method for controlling the admittance of a robot avoiding singular positions provided by an embodiment of the present invention. The admittance control method includes steps:
[0057] S101. Determine the performance index of the target robot according to the current joint angle of the target robot.
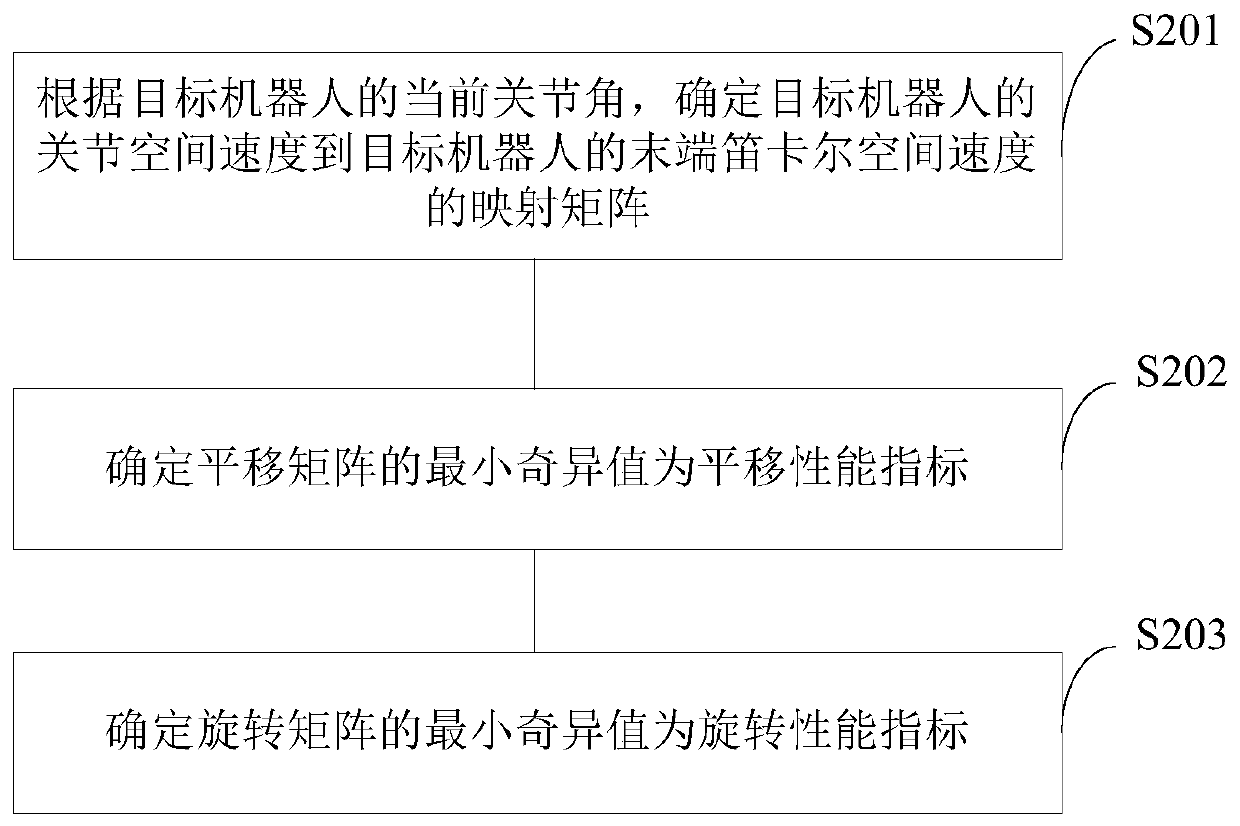
[0058] Wherein, the performance index includes at least a translation performance index and a rotation performance index. Specifically, such as figure 2 As shown, the embodiment of the present invention also provides a specific implementation method of determining the performance index of the target robot according to the current joint angle of the target robot, including steps:
[0059] S201. Determine a mapping matrix from the joint space velocity of the target robot to the end Cartesian space velocity of the target robot according to the current joint angle of the target robot, where the mapping matrix includes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More