

Transverse control method and system of automatic driving truck and storage medium
A lateral control and automatic driving technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as reducing system performance indicators, disturbances, system instability, etc., to improve anti-interference ability and robustness performance, enhance consistency, and improve comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
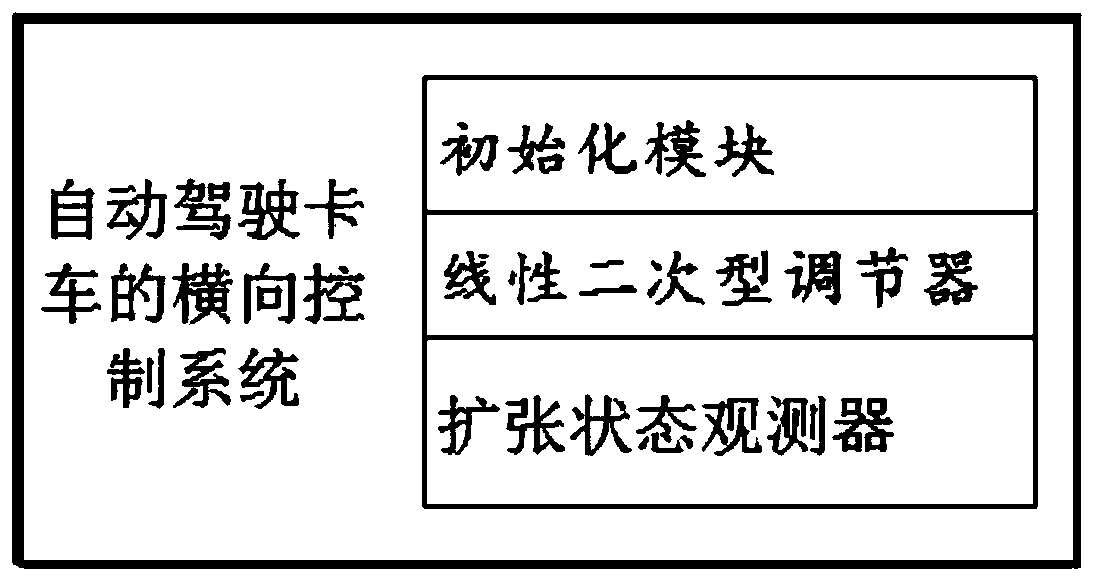
Embodiment 1
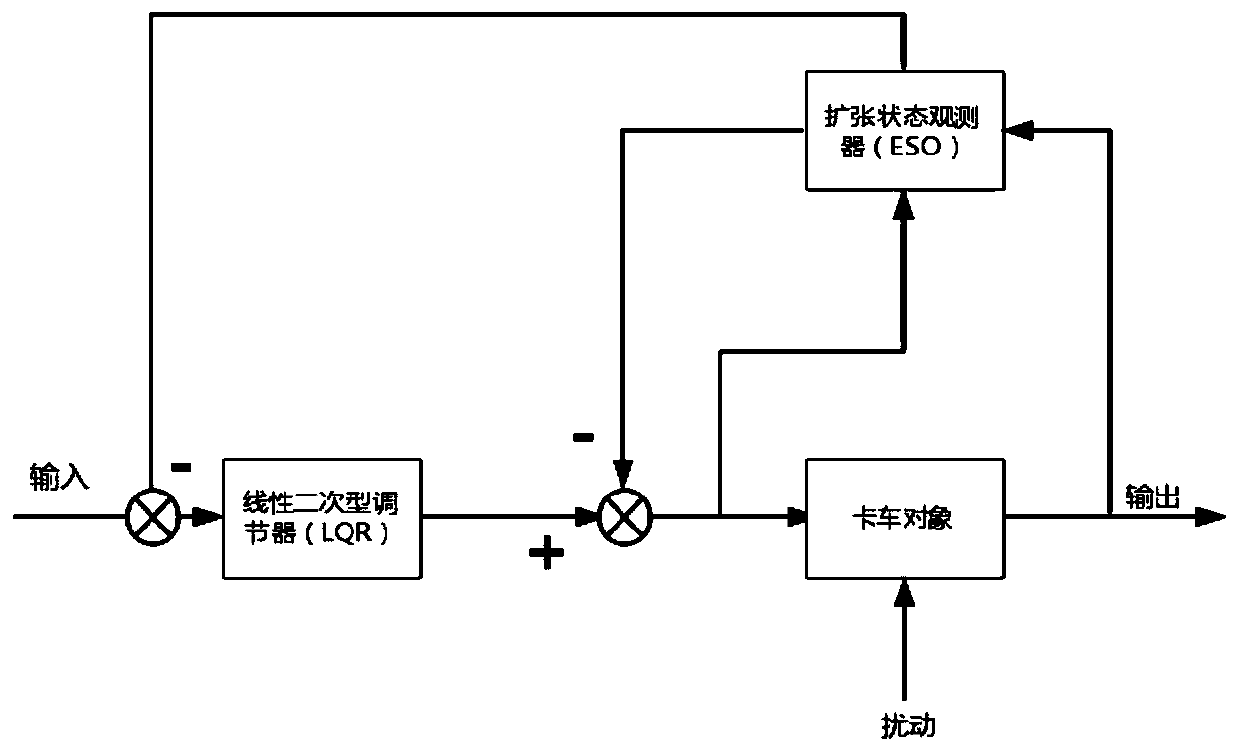
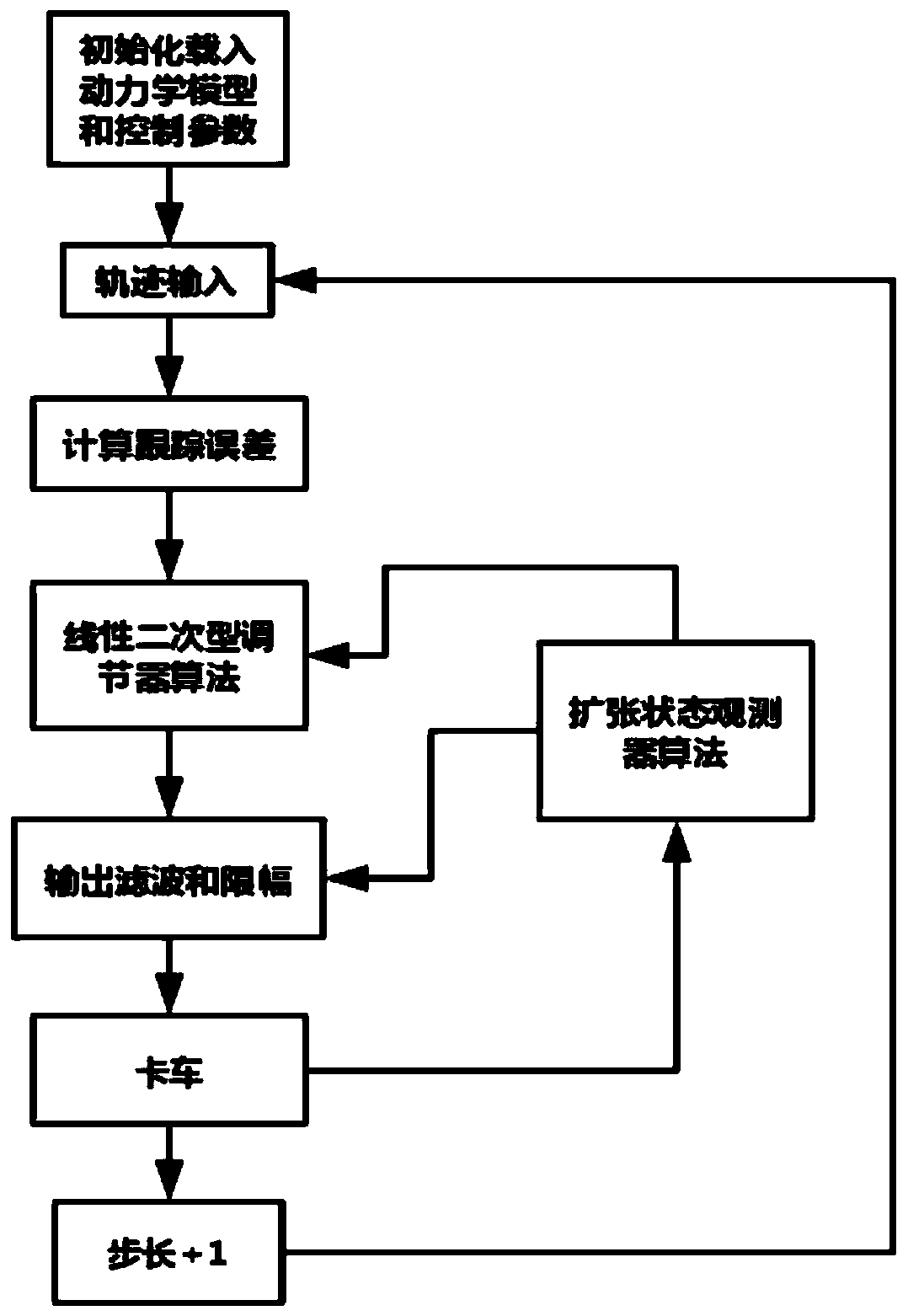
[0059] Such as image 3 Shown, the flow chart of an embodiment of the lateral control method of a kind of self-driving truck of the present invention, its specific steps are as follows.
[0060] Step S000: system initialization. Load the linearized vehicle dynamics model, load the time-varying parameters of the linear quadratic regulator, and load the parameters of the extended state observer.
[0061] The dynamic model of the vehicle is established in the form of state equation as follows:
[0062]
[0063] The parameters are all truck parameters and can be measured and calculated.
[0064] The weight matrices of linear quadratic regulators are all diagonal matrices, the form is as follows:
[0065]
[0066] The estimation equation of the extended state observer is as follows:
[0067]
[0068] where e 1 is the lateral position error of the vehicle, e 2 is the vehicle yaw angle error, b 1 , b 2 Parameters for modeling the truck, b 1 , b 2 , b 3 , b 4 , b ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More