

Parallel binocular camera calibration method based on three-dimensional reconstruction
A binocular camera and 3D reconstruction technology, which is applied in image data processing, instrumentation, computing, etc., can solve problems such as low precision, poor robustness, and few applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
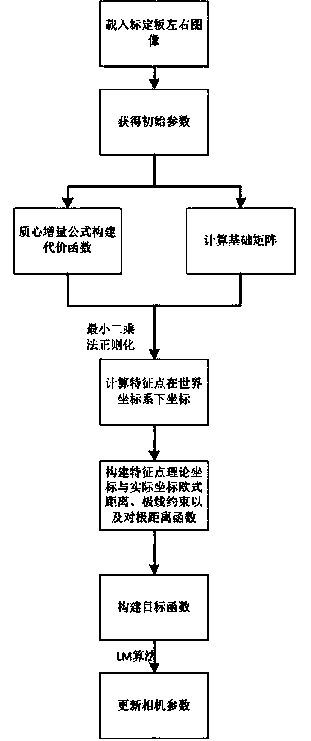
Method used
Image

Examples
Embodiment Construction
[0064] In order to make the technical problems, technical solutions and beneficial effects to be solved by the present invention clearer, the present invention will be further described in detail in combination with the embodiments and accompanying drawings. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. The technical solutions of the present invention will be described in detail below in conjunction with the embodiments and drawings, but the scope of protection is not limited thereto.
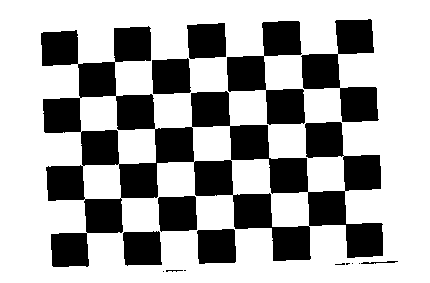
[0065] The present invention uses a binocular camera with a resolution of 1280*480 and a fixed baseline distance of 5cm and a black and white checkerboard calibration board with a side length of 2.7cm to form a binocular vision calibration system. The calibration board is shaped like figure 2 .
[0066] Fix the binocular camera and face the calibration board, rotate the calibration board...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More