

A state estimation method and system for multi-modal perception of a legged robot
A state estimation and robotics technology, applied in the field of robotics, can solve the problems of inaccurate dynamic model calculation, reducing the accuracy and stability of state estimation, including not only the posture of the body, but also the position and posture of the foot joints.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
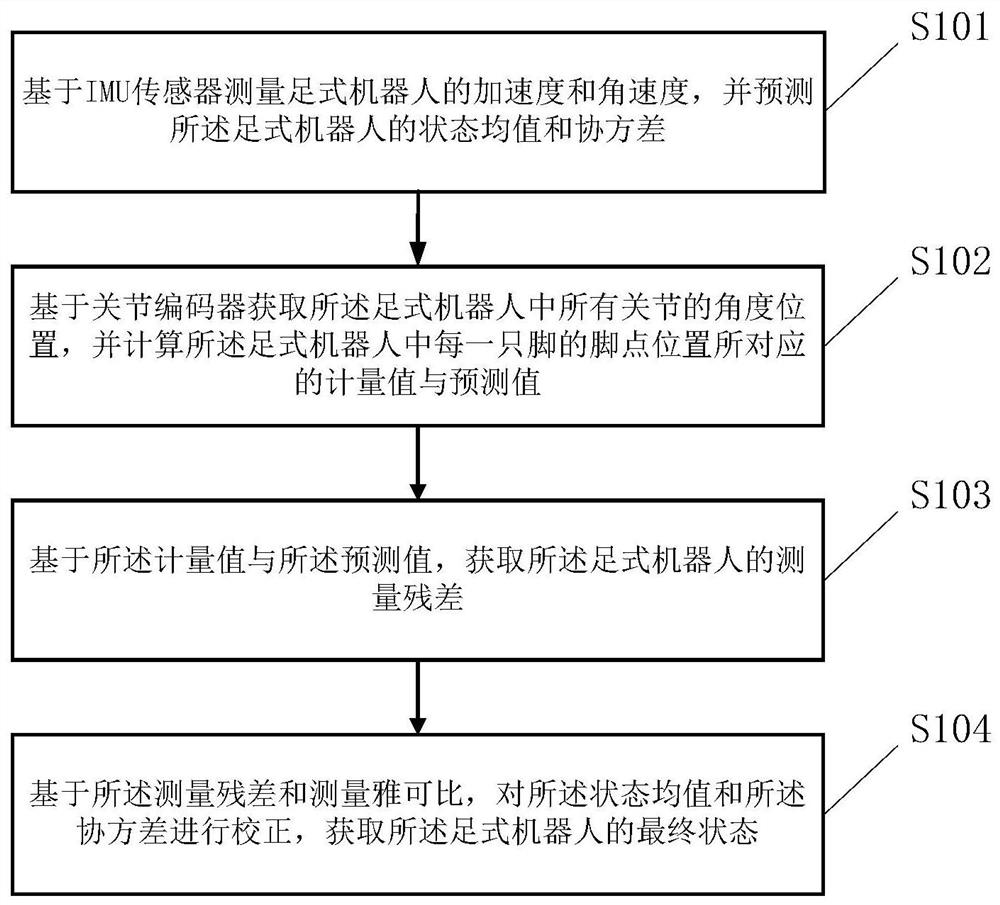
[0060] figure 1 It shows a schematic flowchart of a state estimation method for multi-modal perception of a legged robot in an embodiment of the present invention, and the method includes the following steps:
[0061] S101. Measure the acceleration and angular velocity of the legged robot based on the IMU sensor, and predict the state mean and covariance of the legged robot;
[0062] It should be noted that the IMU sensor includes an accelerometer and a gyroscope,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More