

A current loop delay compensation method for three-phase permanent magnet synchronous motor drive system
A permanent magnet synchronous motor, time delay compensation technology, applied in control systems, control generators, vector control systems, etc., can solve problems such as increasing hardware costs, changing hardware configuration, etc., to achieve enhanced system robustness and high observation accuracy , Dynamic response and fast effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
[0058] This invention may be embodied in many different forms and should not be construed as limited to the embodiments set forth herein. Rather, these embodiments are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the invention to those skilled in the art. In the drawings, components are exaggerated for clarity.
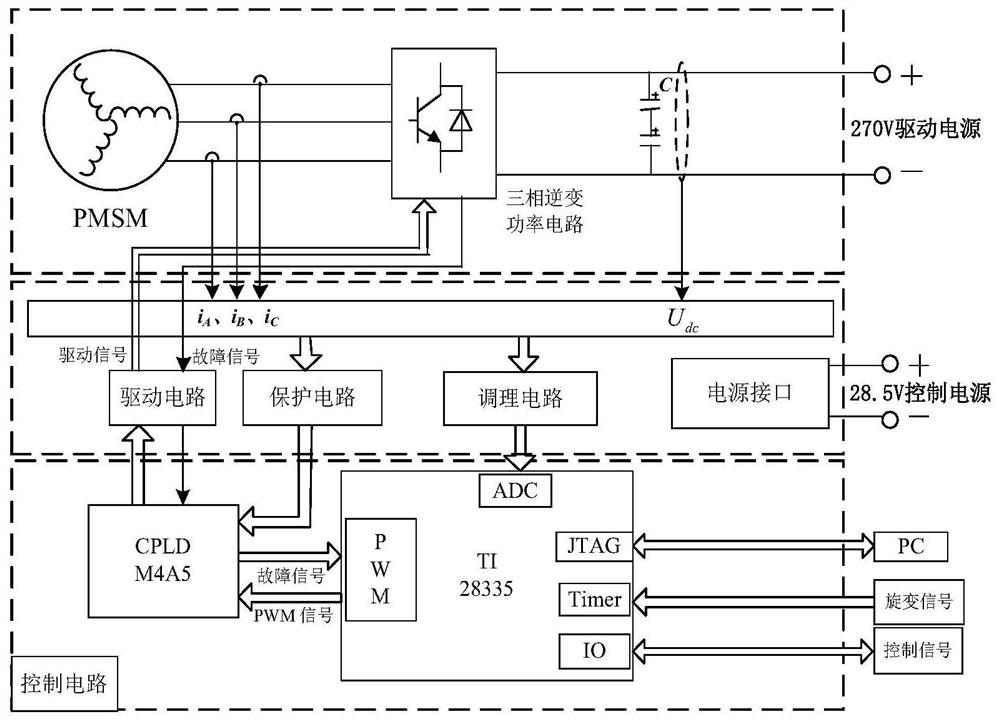
[0059] The invention discloses a current loop delay compensation method for a three-phase permanent magnet synchronous motor drive system, wherein the drive system includes a three-phase inverter power circuit, a control circuit, a bus voltage sampling circuit, a motor three-phase current sampling circuit, and a motor rotor Position sampling circuits such as figure 1 shown.
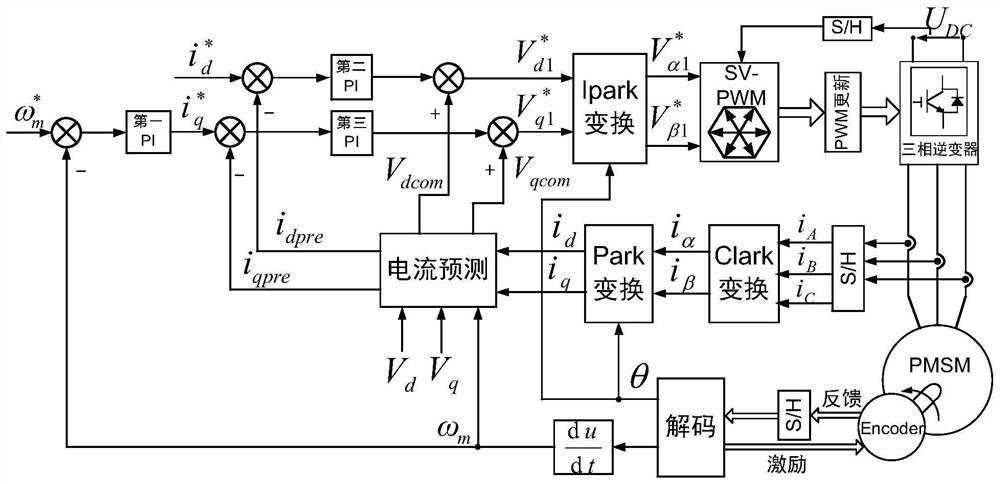
[0060] like figure 2 As shown, the delay compensation method includes the following steps:
[0061] Step 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More