

Integrated six-dimensional force sensor with double-I-shaped cross beam structure
A technology of six-dimensional force sensor and shaped cross beam, which is applied in the direction of measuring force components, etc., can solve the problems of difficult to apply to the end of the robot actuator, low sensitivity, and small gap between the serpentine structure beams, so as to improve the anti-overload performance and use The effect of safety, high measurement sensitivity and low processing difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be pointed out that for those of ordinary skill in the art, a number of modifications and improvements can be made without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
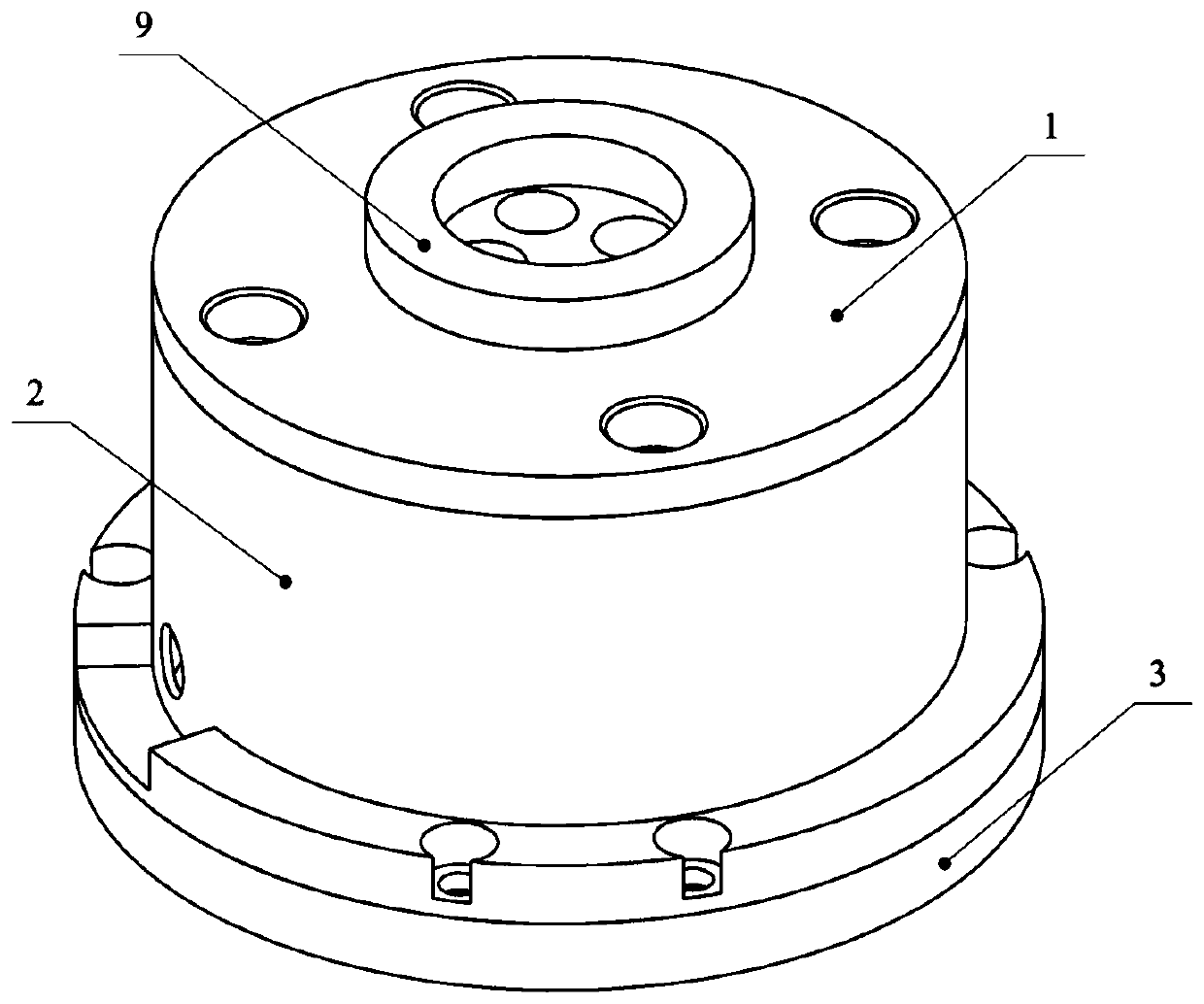
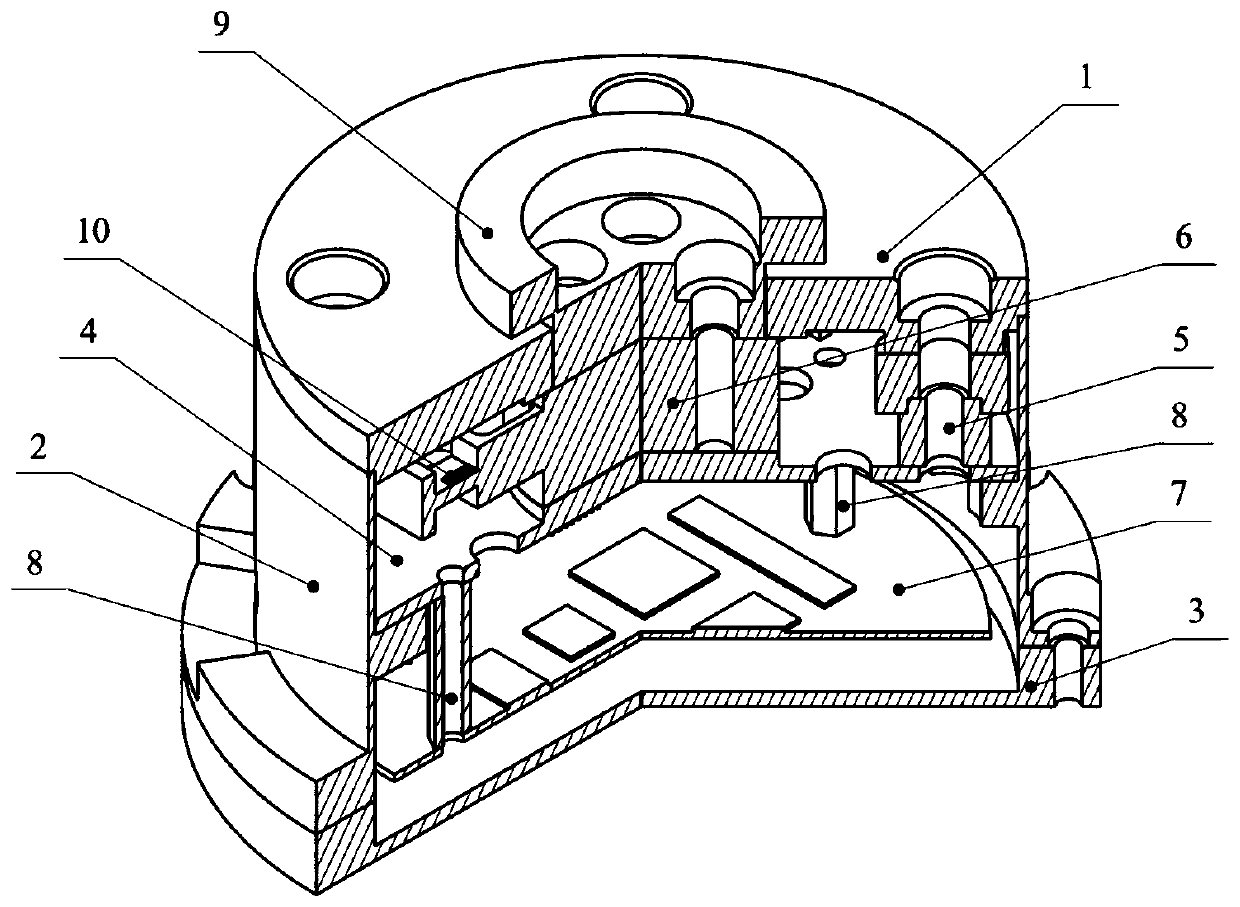
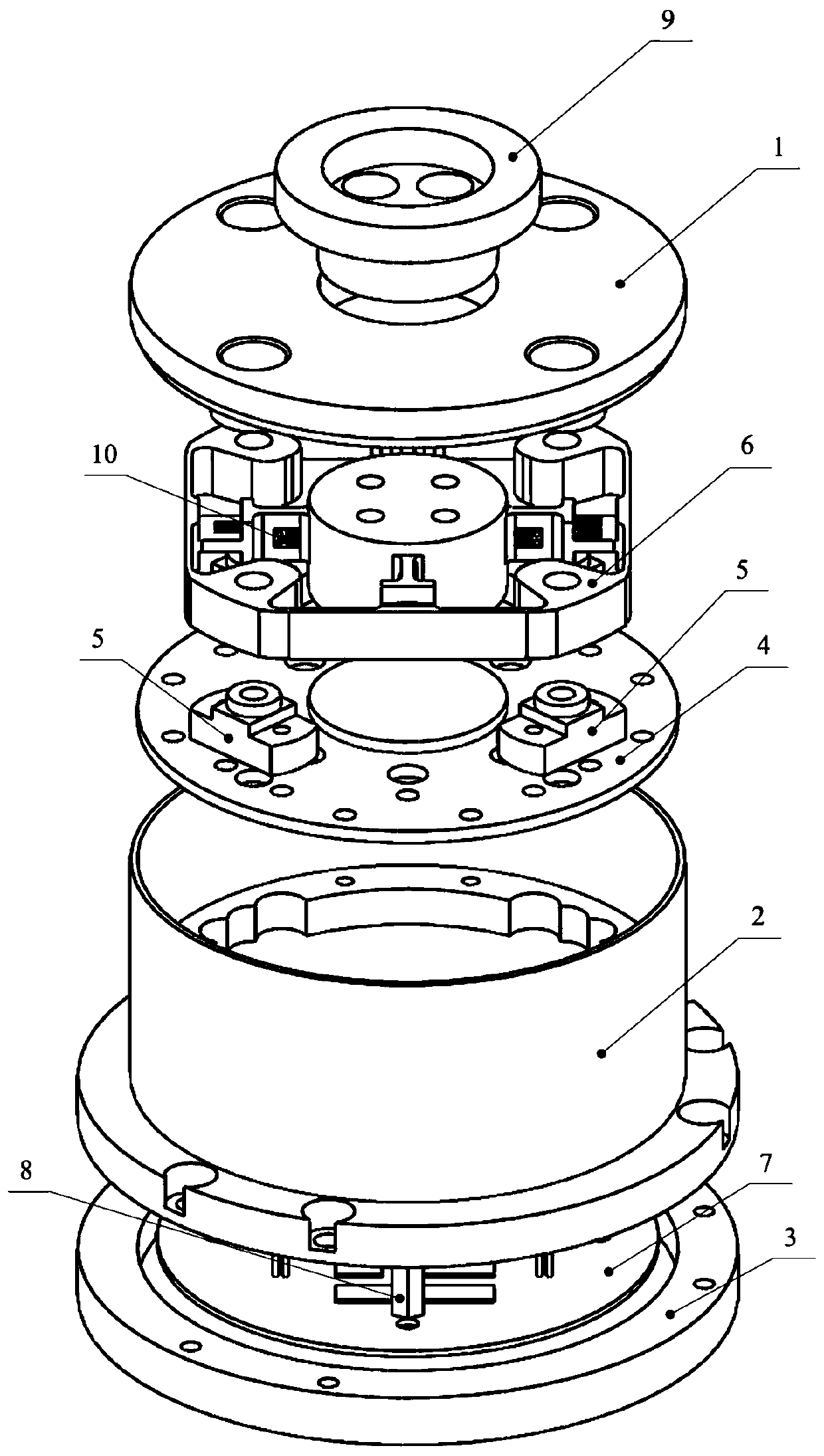
[0053] Reference figure 1 , figure 2 , image 3 As shown, it is a structural schematic diagram of an integrated six-dimensional force sensor with a double "I"-shaped cross beam structure in an embodiment of the present invention.
[0054] Reference figure 1 As shown, the sensor includes: a double "I" shaped cross beam 6 and a number of resistance strain gauges 10; among them, the double "I" shaped cross beam 6 includes an outer ring 6-1, four elastic bodies 6-2A, 6- 2B, 6-2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More