

AGV path tracking method based on inversion sliding mode control
A technology of path tracking and sliding mode, which is applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of switching delay of variable structure control and chattering of the system, and achieve chattering suppression, accurate and fast Effect of path tracing and shortening the time for system convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
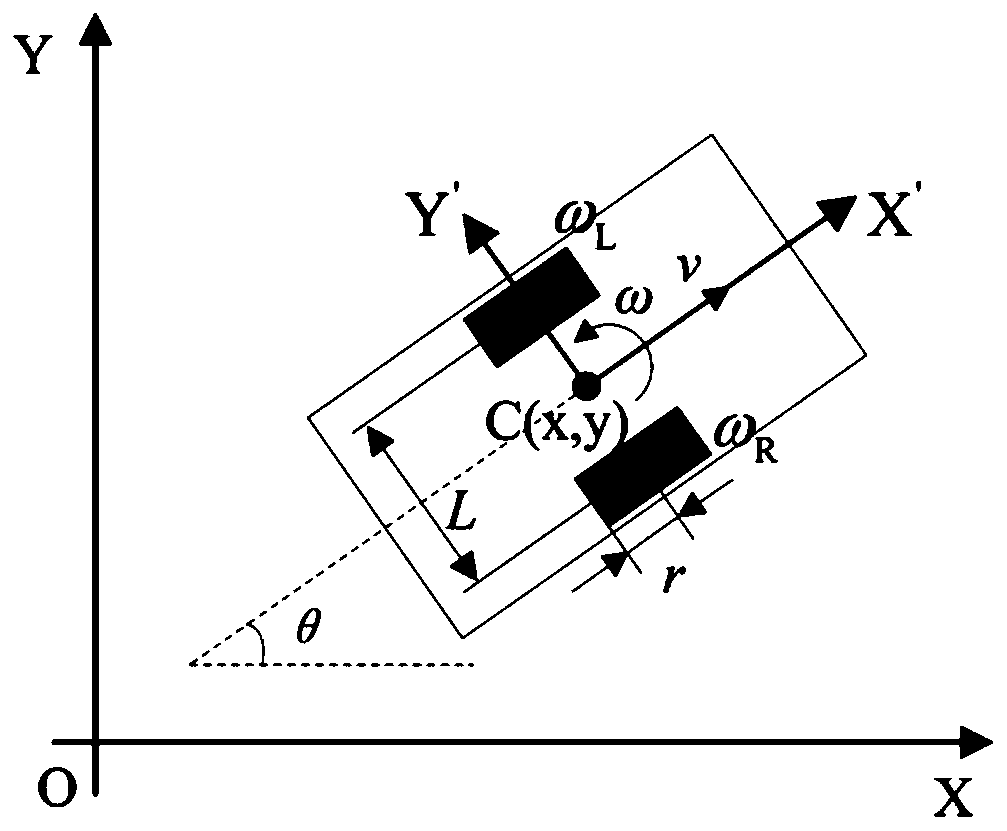
[0049] The specific embodiments of the present invention will be described below in conjunction with the accompanying drawings.
[0050] Such as figure 1 Shown is one of the embodiments of the present invention - a schematic diagram of the motion of the two-wheel differential drive AGV, figure 1 The global coordinate system XOY and the local coordinate system X'CY' with the midpoint C of the line connecting the two driving wheels of the AGV as the origin of the coordinates are respectively established. v and ω are the linear velocity and rotational angular velocity of the AGV, and ω L , ω R They are the angular velocity of the left and right drive wheels, r and L are the radius and distance of the two wheels, θ is the angle between the movement direction of the car body and the positive direction of the X-axis, x is the coordinate value of the AGV along the direction of the desired path, and y is the vertical Coordinates in the direction of the desired path. For an AGV path...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More