

Active-passive hybrid driving type intelligent artificial limb knee joint structure
A technology of hybrid drive and intelligent prosthetics, applied in prosthesis, medical science, artificial legs, etc., can solve problems such as safety accidents, inability to provide active torque, and unreliable stability of pneumatic knee joint support performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be described in detail below in conjunction with the embodiments and accompanying drawings.
[0021]
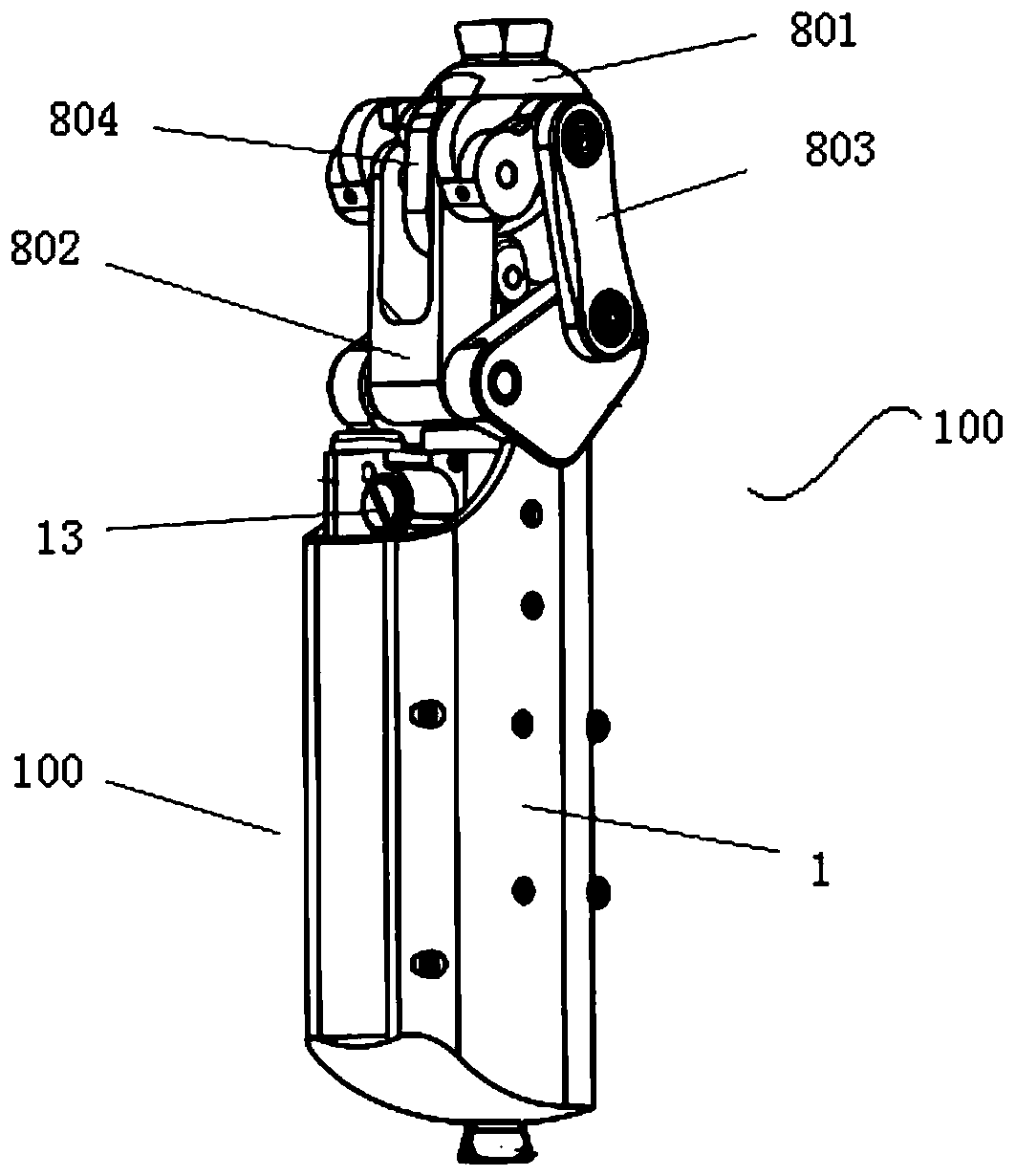
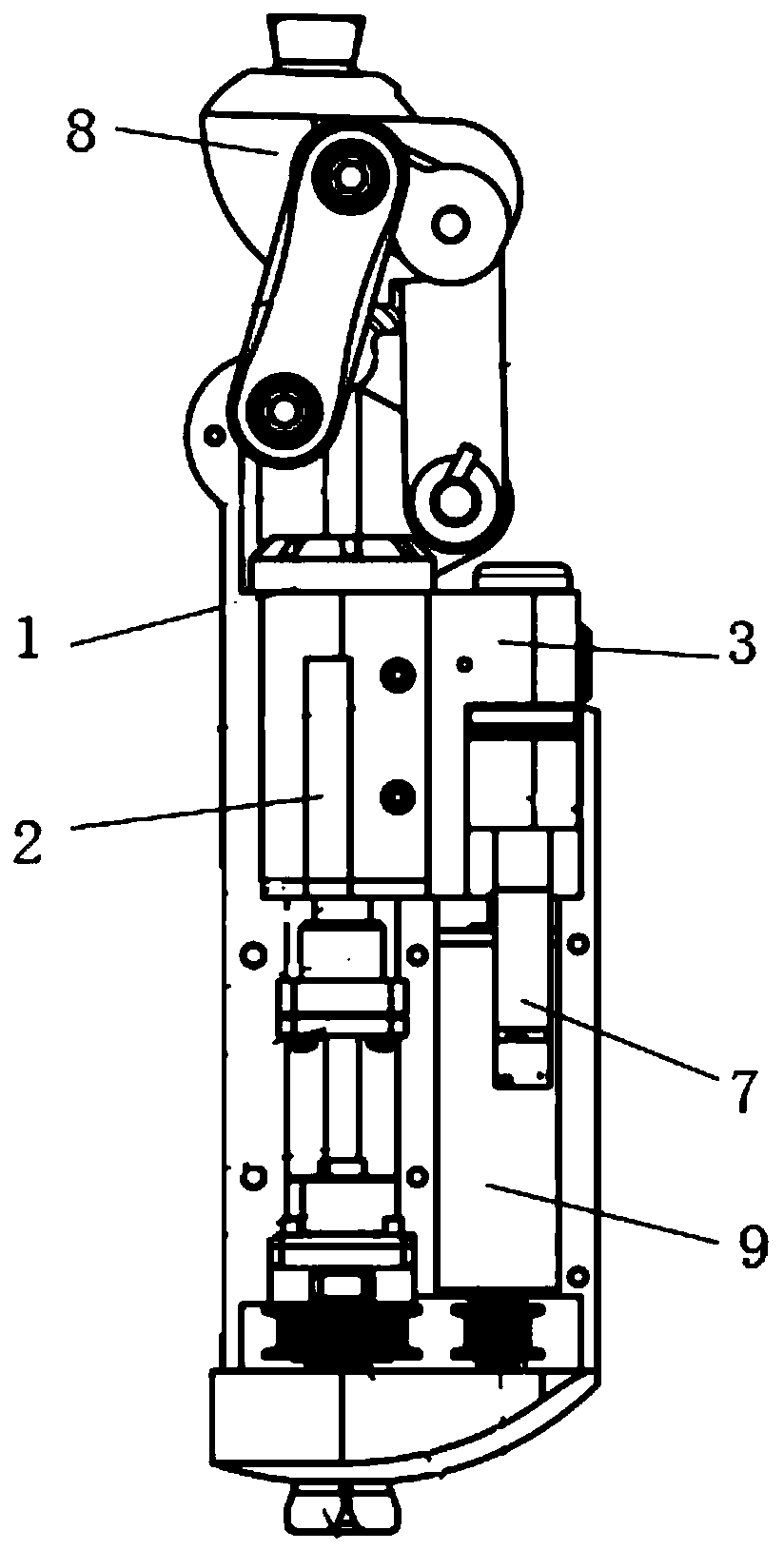
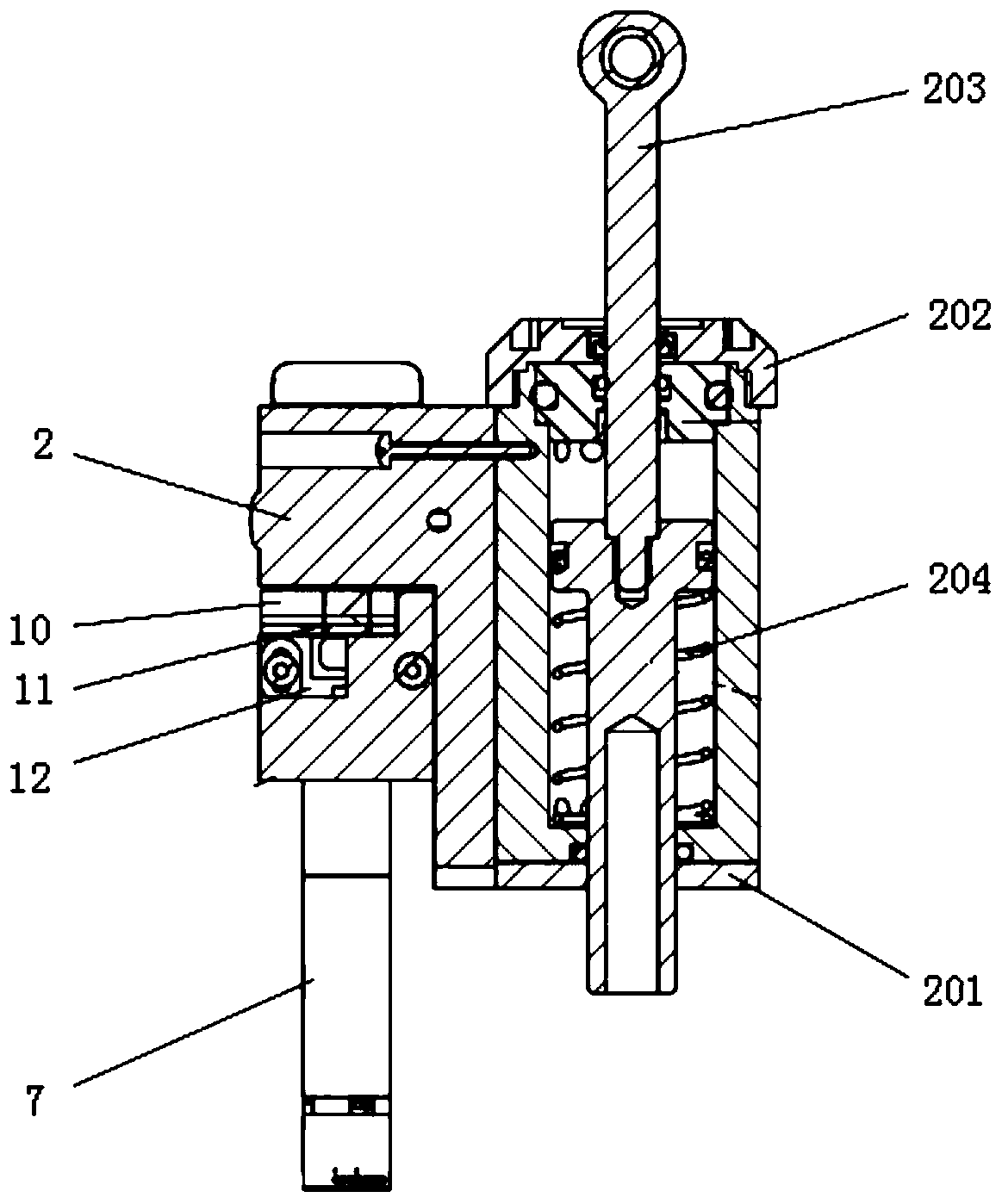
[0022] figure 1 It is a three-dimensional view of an active-passive hybrid driving intelligent prosthetic knee joint structure in an embodiment of the present invention. figure 2 It is a schematic diagram of the internal structure of an active-passive hybrid driving intelligent prosthetic knee joint structure in an embodiment of the present invention. image 3 It is a schematic diagram of a two-way damping cylinder in an embodiment of the present invention. Figure 4 It is a schematic diagram of the driving mechanism in the embodiment of the present invention. Figure 5 It is a schematic diagram of the two-way damping cylinder and the damping adjustment seat in the embodiment of the present invention. Figure ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More