

Mechanical arm action learning method and system based on third-person imitation learning
An action learning and third-person technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as increased learning costs and domain confusion, and achieve the effect of reducing the amount of calculation, reducing the impact, and speeding up the training process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Below in conjunction with specific embodiment, further illustrate the present invention, should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various equivalent forms of the present invention All modifications fall within the scope defined by the appended claims of the present application.
[0035] The method for learning the action of a mechanical arm based on third-person imitation learning includes the following steps:
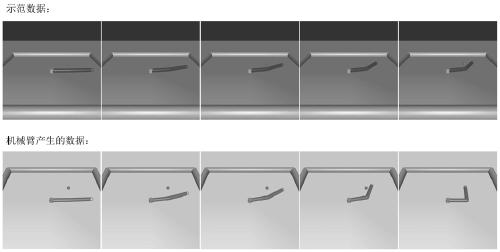
[0036] S1, the input demonstration sample τ E Only by observing the image sequence {o 1 ,o 2 ,o 3 ,...,o T} instead of the state-action sequence {s in traditional imitation learning 1 ,a 1 ,s 2 , a 2 ,...,s T-1 , a T-1 ,s T}. where T is the maximum time step, and o is the RGB image extracted directly from the video;
[0037] S2. The robotic arm execute...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More