

Virtual anchoring navigation control algorithm for wave glider
A control algorithm and glider technology, applied in two-dimensional position/channel control, non-electric variable control, control/regulation system, etc., can solve the difficulties of anchoring navigation control, low anchoring accuracy, and difficulty in realizing ocean monitoring and data Acquisition and other issues to achieve the effect of eliminating accuracy errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
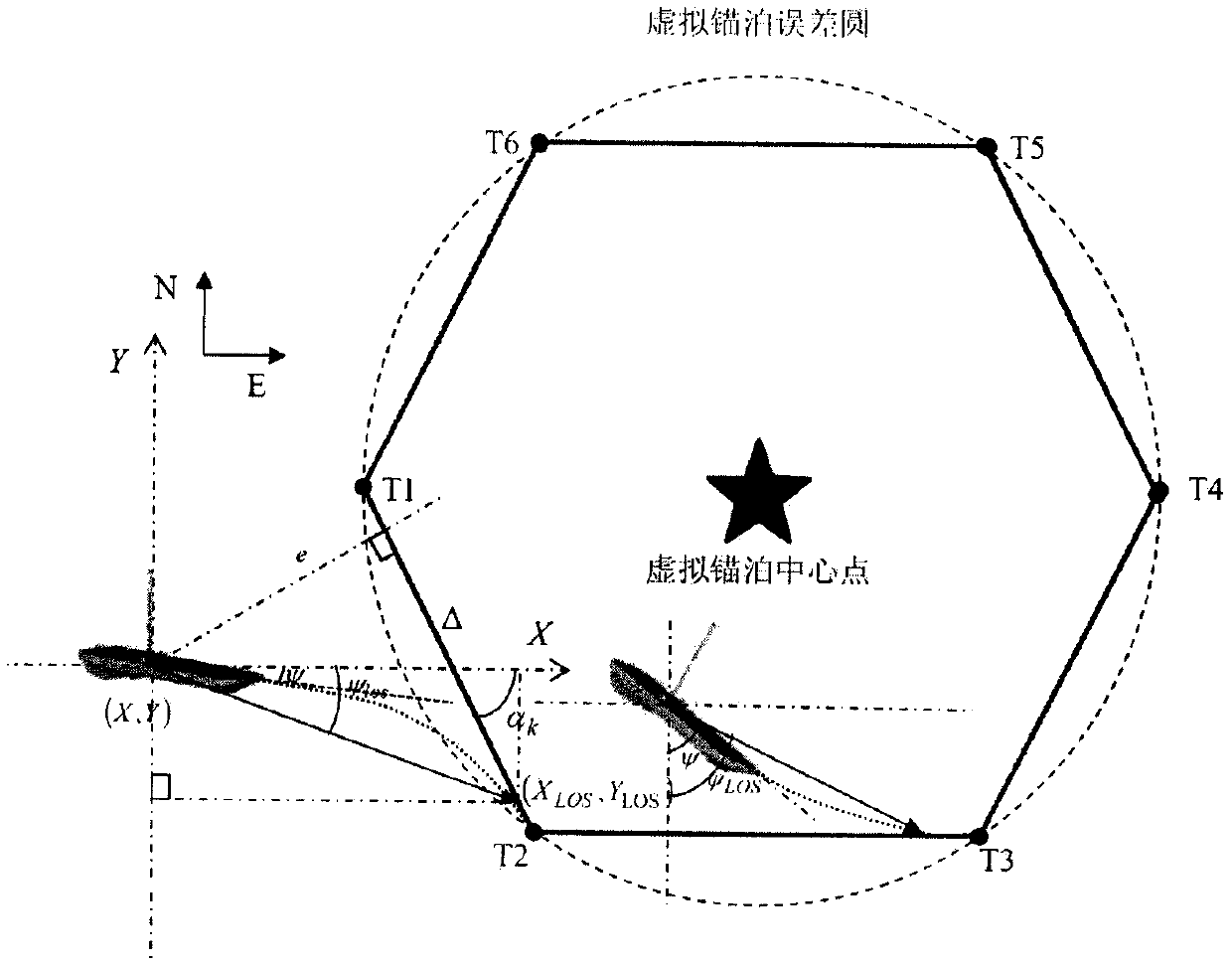
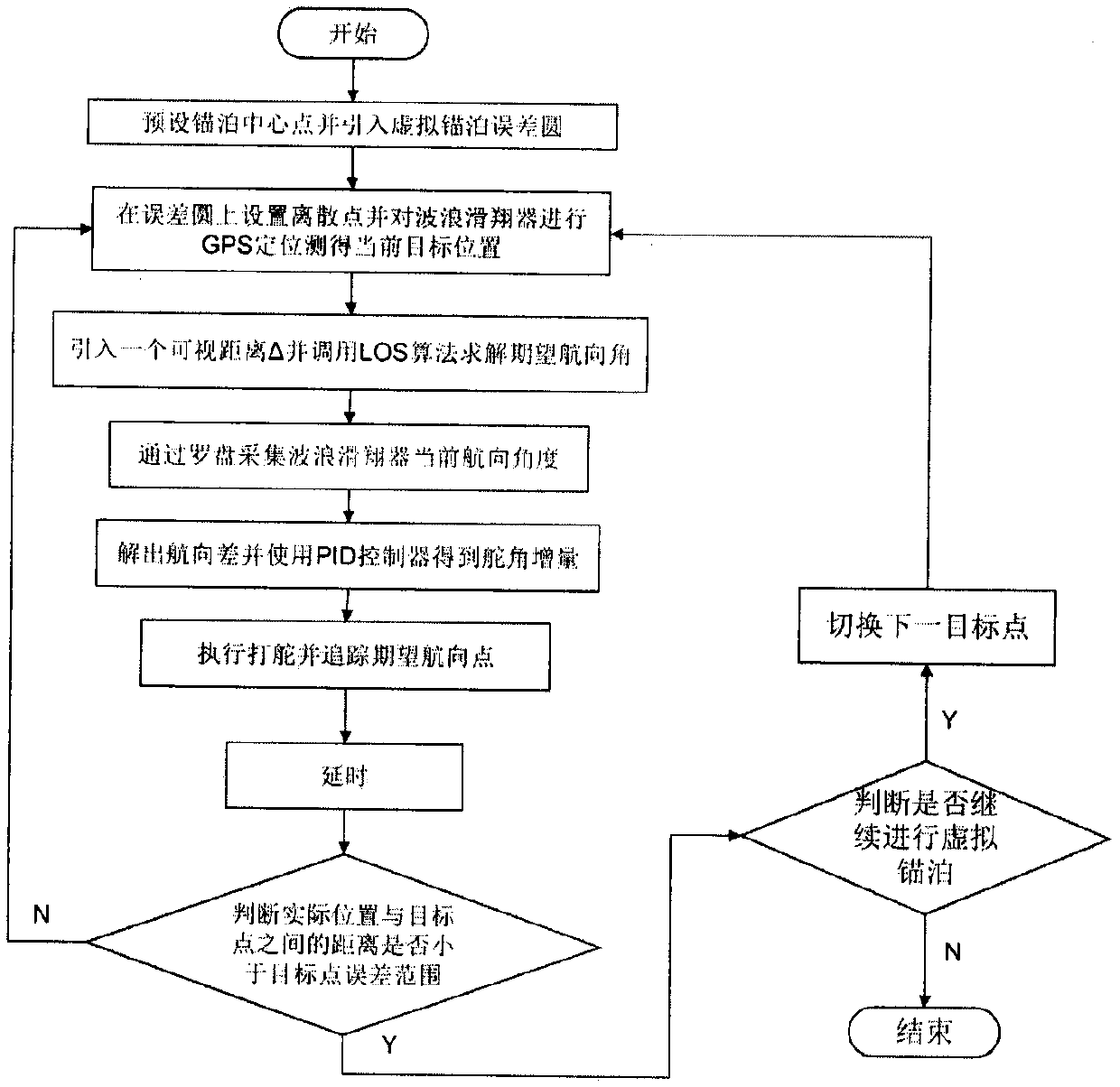
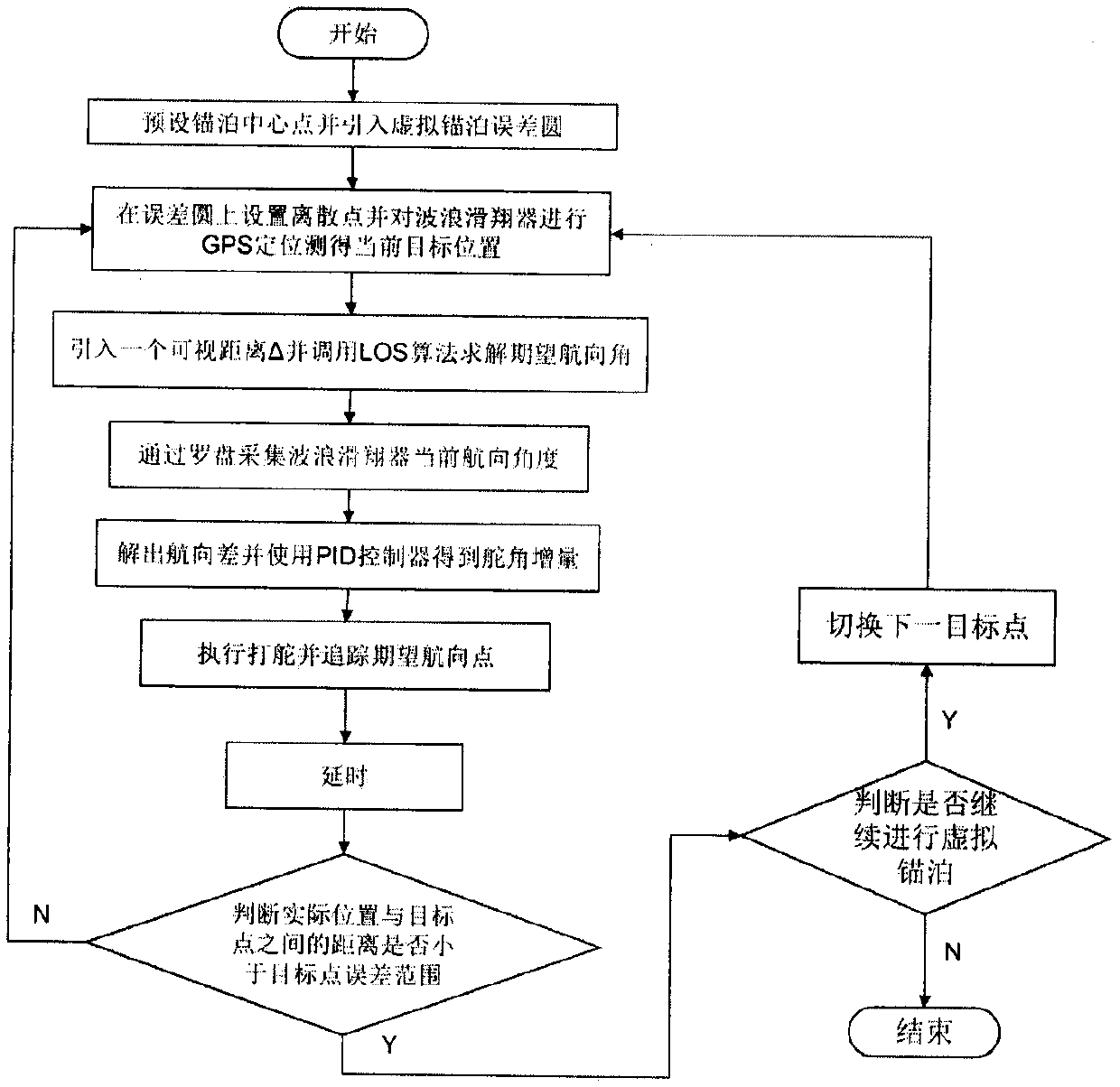
[0013] Such as figure 1 As shown, given the anchoring center point of the wave glider, introduce a virtual anchoring error circle, give the error circle radius R, discretize the error circle, take several target heading points, and use the compass to measure the current actual heading angle ψ, Measure the current target position (X, Y) through GPS positioning, calculate the distance between the two points through the coordinates of the current position and the target position, and use the LOS algorithm to solve the expected heading angle ψ los , will get the heading difference ψ e Make it close to zero through PID control, and solve the current desired rudder angle δ. The generated expected rudder angle δ acts directly on the tail rudder mechanism of the wave glider, so that the wave glider can move forward along the straight line in the de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More