

Robotic arm control method based on man-machine fusion
A control method and technology of manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as direct control, difficulty in completely obtaining on-site 3D information, discrimination errors, etc., and achieve good heterogeneous control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
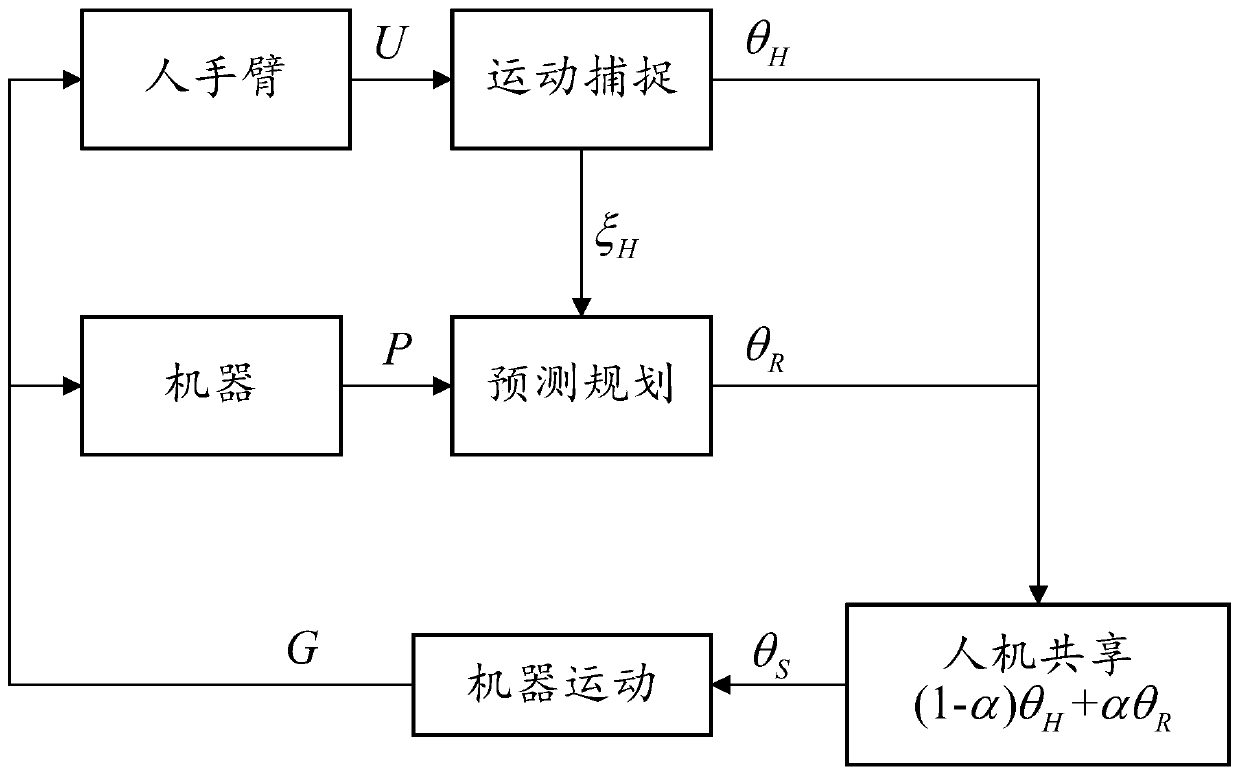
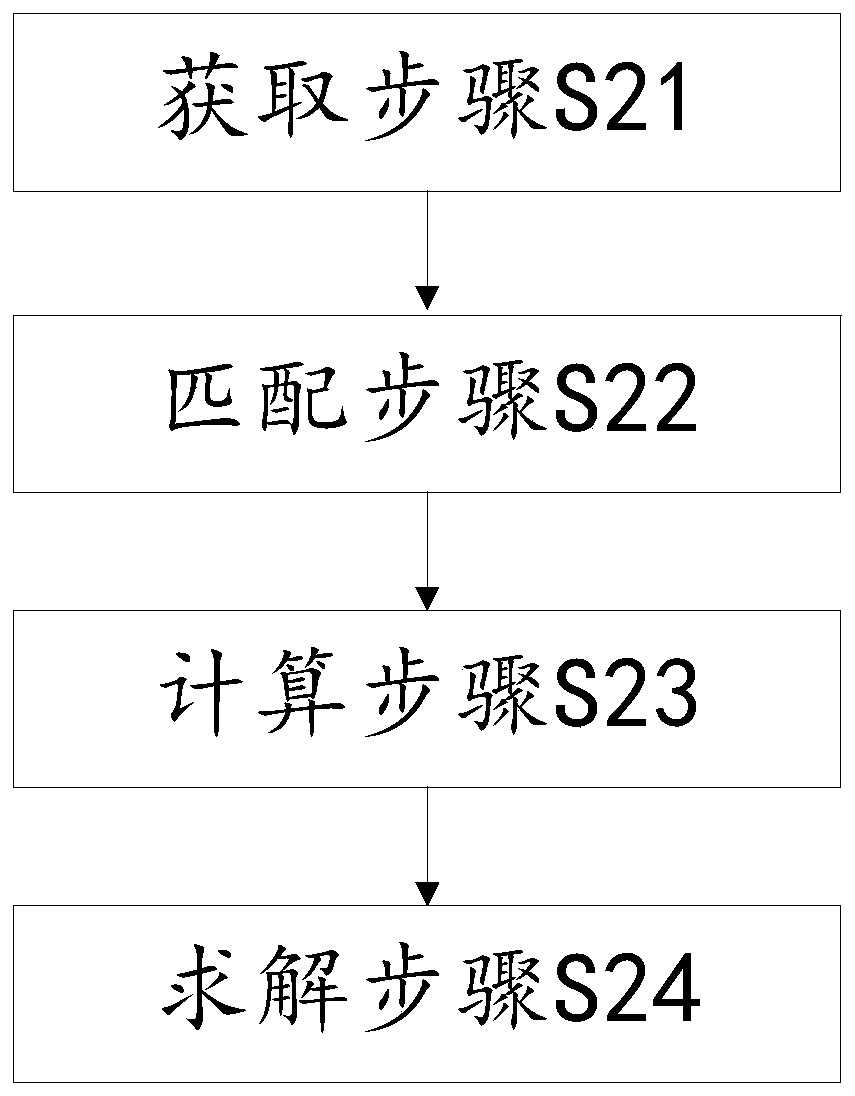
[0056] Such as figure 1 As shown, the man-machine fusion-based robotic arm control method of the present invention includes an acquisition step S1, a mapping step S2, a planning step S2, a fusion step S4 and a control step S5, and the specific process is as follows:
[0057] Obtaining step S1, acquiring the surrounding real-time scene images of the target object.
[0058] Specifically, the camera mounted on the robot or the camera arranged at the work site is used to obtain the scene image of the robot during the work process. The number of cameras is arranged according to the actual situation, and the depth information of the work scene can also be obtained based on the deployment of the depth camera.
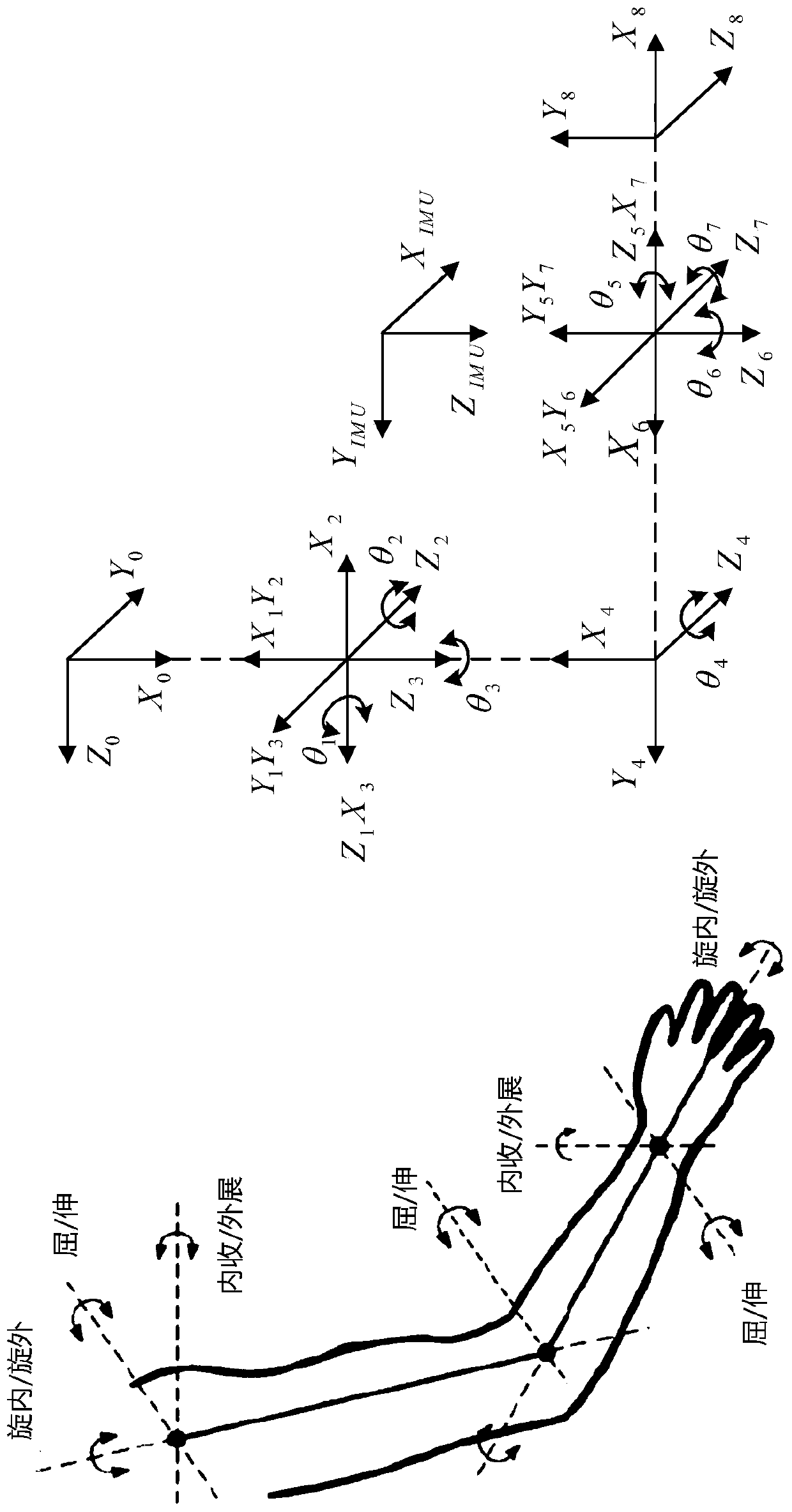
[0059] In the mapping step S2, the real-time scene image is displayed on the operating end, and the series data of the human arm joint angle during the demonstration movement of the human arm are obtained, and the human arm joint angle data is mapped into the mapped joint angl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More