Joint rotating angle auxiliary measuring system and method of serial rotary joint mechanical arm
A joint angle and auxiliary measurement technology, applied in the direction of manipulators, manufacturing tools, joints, etc., to achieve the effect of simplifying the equipment installation process, simplifying the joint angle measurement process, and low implementation cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
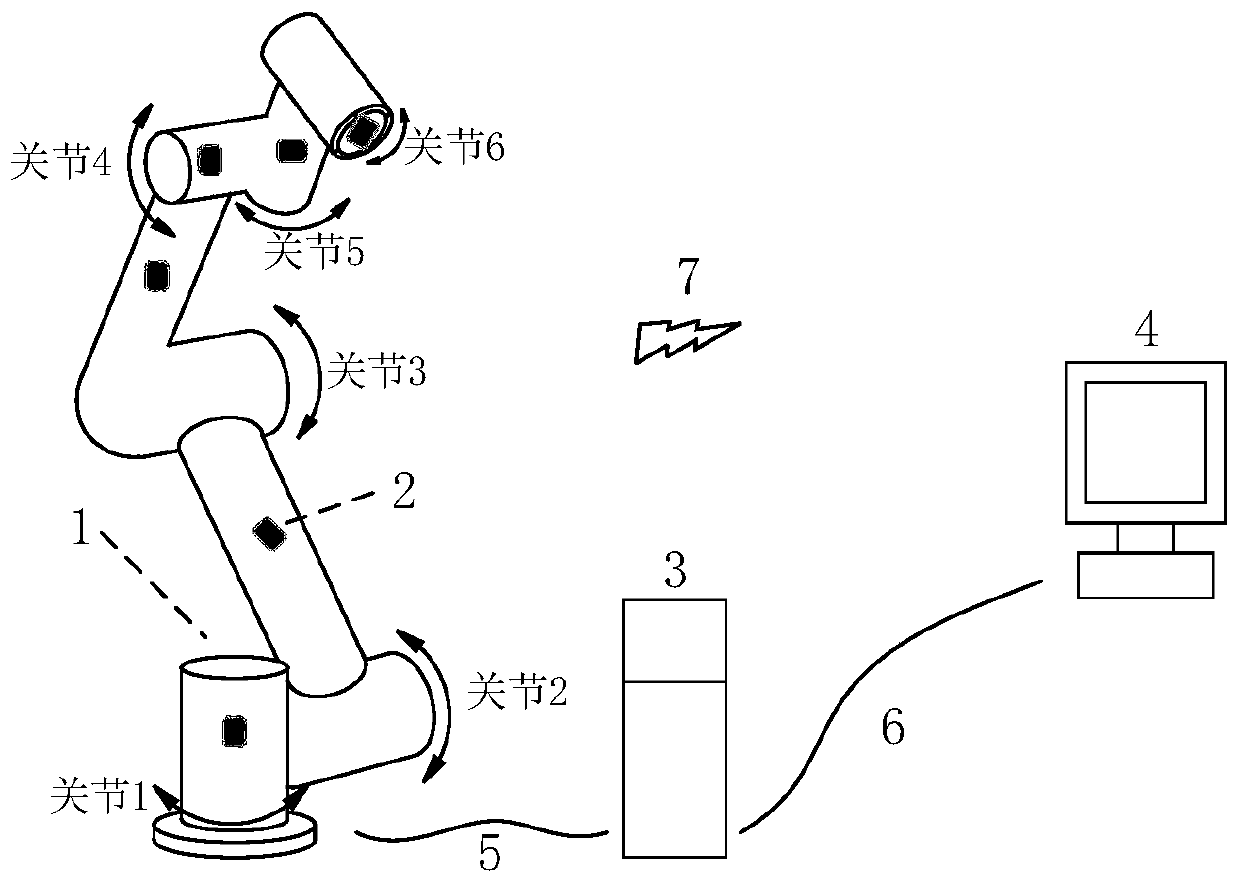
[0054] figure 1 It is a structural schematic diagram of a series rotary joint manipulator joint angle auxiliary measurement system constructed according to a preferred embodiment of the present invention, wherein 1 is a series rotary joint manipulator, 2 is an attitude measurement unit, 3 is a control cabinet of the manipulator, 4 is the computer, 5 is the cable between the robot arm 1 and the control cabinet 3, 6 is the network cable connecting the control cabinet 3 to the computer 4, and 7 is the communication between each attitude measurement unit 2 fixed on the robot arm 1 and the computer 4 Way.
[0055] The mechanical arm 1 can be any multi-degree-of-freedom series rotary joint mechanical arm in practice. For convenience, figure 1 What is shown in is a common six-degree-of-freedom series rotary joint manipulator.
[0056] The number of the attitude measurement units 2 should match the degrees of freedom of the robot arm, and the attitude measurement units 2 can be fixe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



