

Control method and system of cleaning robot
A technology for cleaning robots and control methods, applied in the field of smart homes, can solve problems such as running time and storage space consumption, and achieve the effects of increasing throughput, reducing network power consumption, and improving speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0051] This embodiment provides a control method for a cleaning robot, including:
[0052] The ultrasonic sensor is used to obtain the global position and distance, the infrared sensor is used to collect local obstacle avoidance information, and the gyroscope sensor is used to collect the robot's own angle;
[0053] Establish a global coordinate system, take the position point when the robot starts working as the origin, and take the ground as the XY plane, model according to the global position data collected by the ultrasonic sensor, and obtain the position information of each obstacle;
[0054] Pre-processing the obstacle data, including:
[0055] The nonlinear irregular obstacles are bounded by the envelope method to make the irregular obstacles rectangular;
[0056] Normalize the bounded obstacles set against the wall according to the wall;
[0057] The indoor environment map is represented by the grid method, in which the sub-grid size is designed according to the size...
Embodiment 2
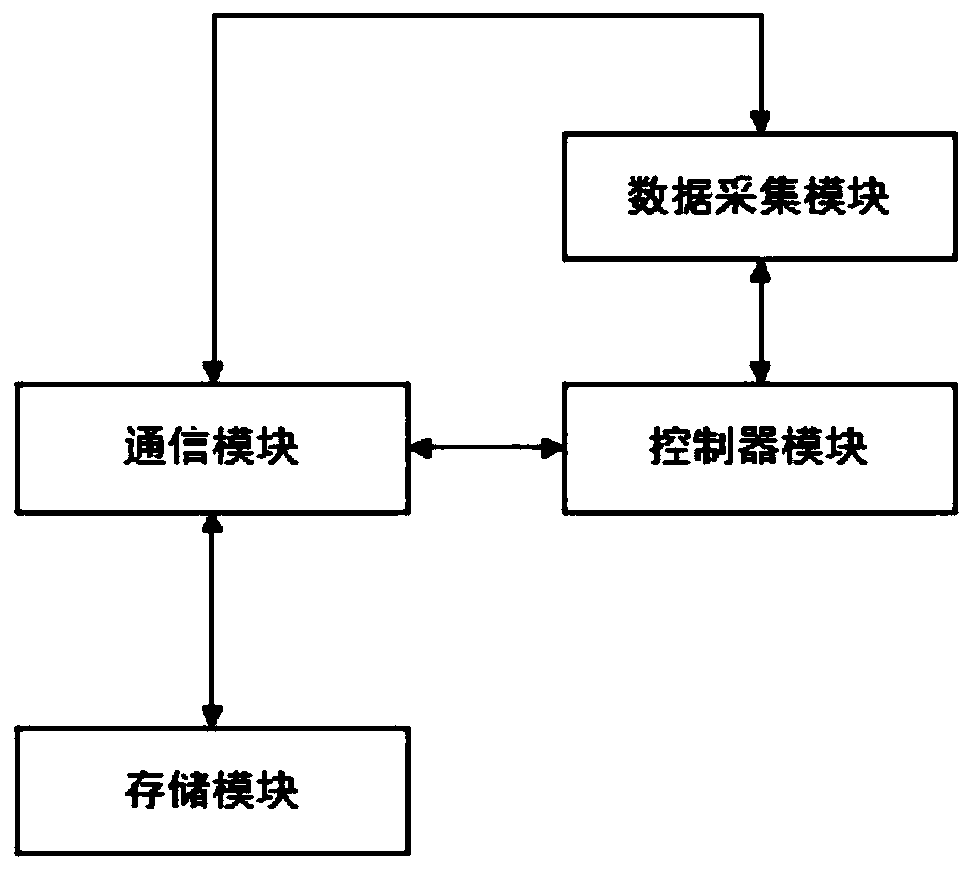
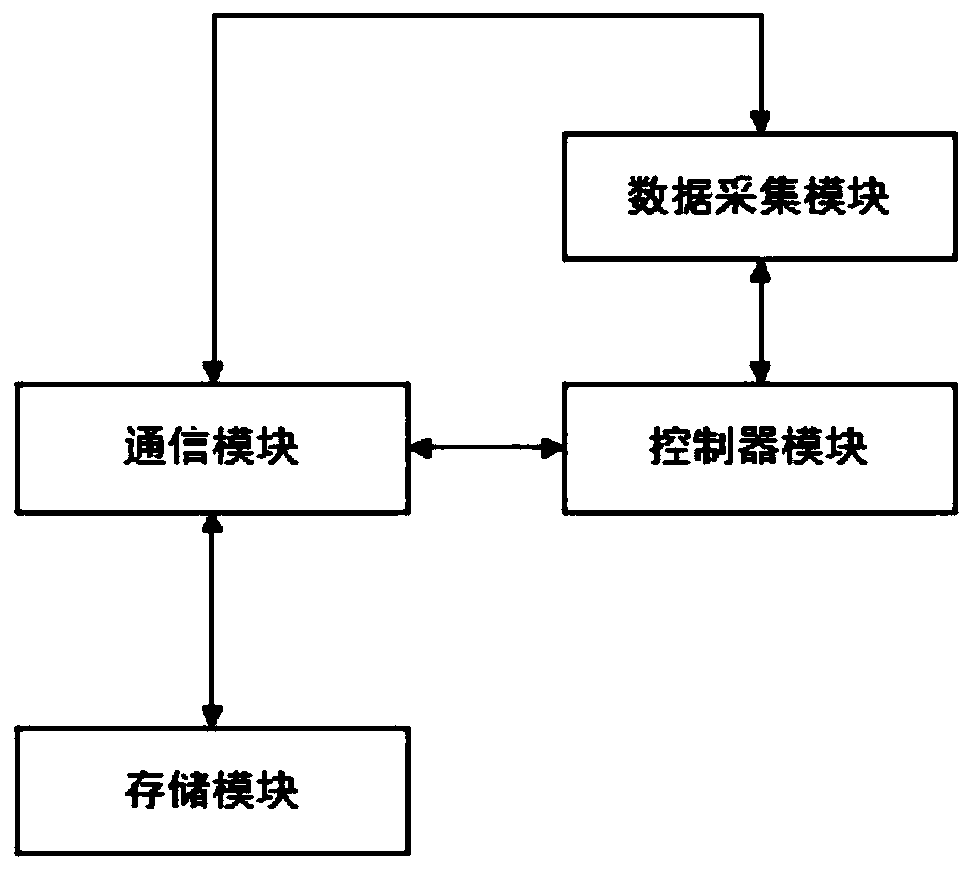
[0070] Please refer to figure 1 , the present embodiment provides a control system of a cleaning robot, a data acquisition module, a memory module, a controller module, and a communication module;
[0071] The data acquisition module includes an ultrasonic sensor, an infrared sensor and a gyroscope sensor, which are used to obtain global position distance, local obstacle avoidance information collection, and self-angle collection respectively;
[0072] The memory module is used to store the data collected by the data acquisition module, and transmit the data to the controller module through the communication module for data processing;
[0073] The controller module is configured to receive the data sent by the memory module, and perform the following operations:
[0074] Establish a global coordinate system, take the position point when the robot starts working as the origin, and take the ground as the XY plane, model according to the global position data collected by the ul...
Embodiment 3
[0085] This embodiment provides a cleaning robot, which includes a robot body, a memory, a processor, and a computer program stored in the memory and operable on the processor that are connected to each other in communication, wherein the robot body receives The control instructions of the processor are matched to implement the steps of the method described in Embodiment 1 when the computer program is executed.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More