

Walking speed adjusting method for biped robot to simulate gait of person
A biped robot and walking speed technology, applied in the field of robotics, can solve complex problems and achieve the effect of improving walking flexibility and environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the drawings and embodiments.
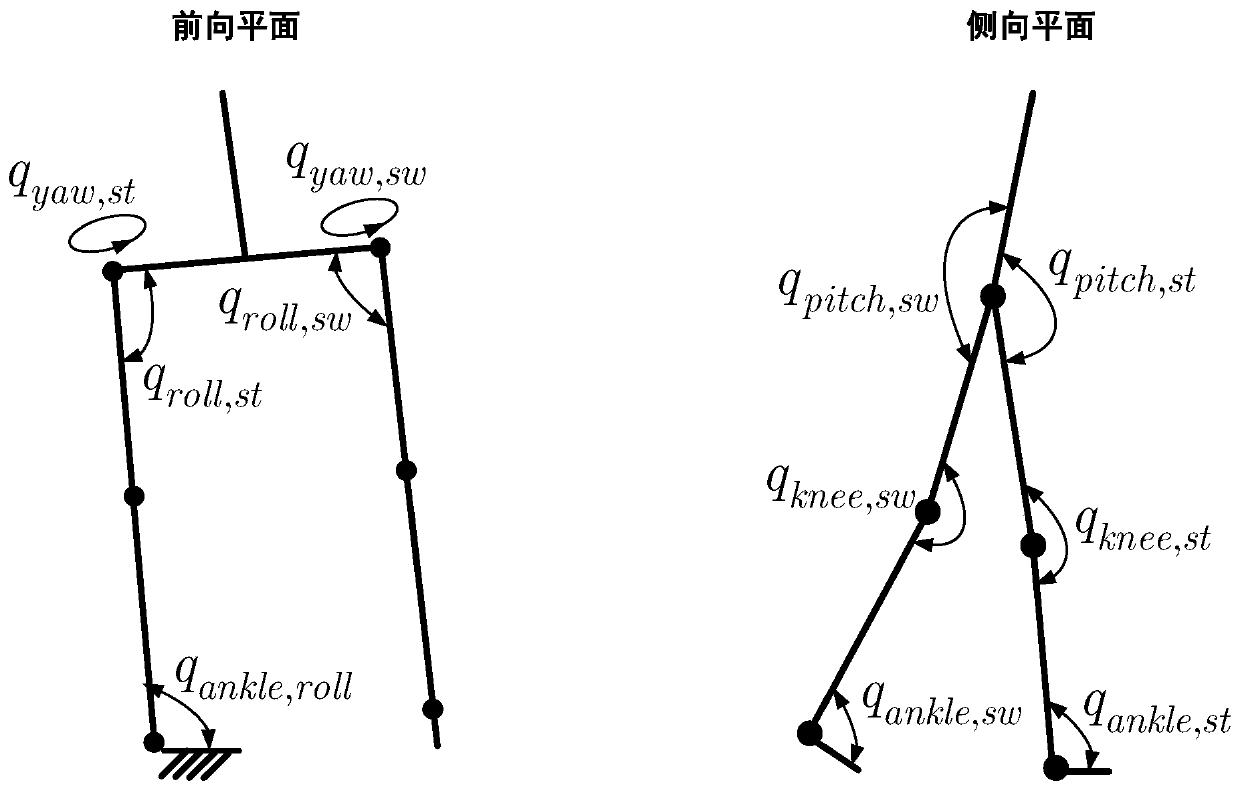
[0031] Such as figure 1 As shown, this embodiment considers a biped robot with 11 degrees of freedom, q ankle,roll To support the degree of freedom of the ankle joint in the forward plane, q ankle,st To support the degree of freedom of the ankle joint in the lateral plane, q knee,st Is the degree of freedom of the knee joint of the supporting leg, q yaw,st Is the rotational freedom of the hip joint of the supporting leg, q roll,st Is the swing freedom of the hip joint of the supporting leg, q pitch,st Is the pitching freedom of the hip joint of the supporting leg, q yaw,sw Is the rotational freedom of the hip joint of the swing leg, q roll,sw Is the swing freedom of the hip joint of the swing leg, q pitch,sw Is the pitching freedom of the hip joint of the swing leg, q knee,sw Is the degree of freedom of the knee joint of the swing leg, where q ankle,sw Is the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More