

360-degree three-dimensional reconstruction optimization method based on continuous phase dense matching
A dense matching and three-dimensional reconstruction technology, applied in the field of three-dimensional reconstruction, can solve the problems of registration error accumulation and unrealization, and achieve the effect of improving accuracy, non-contact calculation, and high reconstruction accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] A typical embodiment of a 360° three-dimensional reconstruction optimization method based on continuous phase dense matching of the present invention will be described in detail below, and the present invention will be further described in detail. It is necessary to point out that the following examples are only used for further description of the present invention, and cannot be interpreted as limiting the protection scope of the present invention, and those skilled in the art make some non-essential improvements to the present invention according to the above-mentioned content of the present invention And adjustments still belong to the protection scope of the present invention.
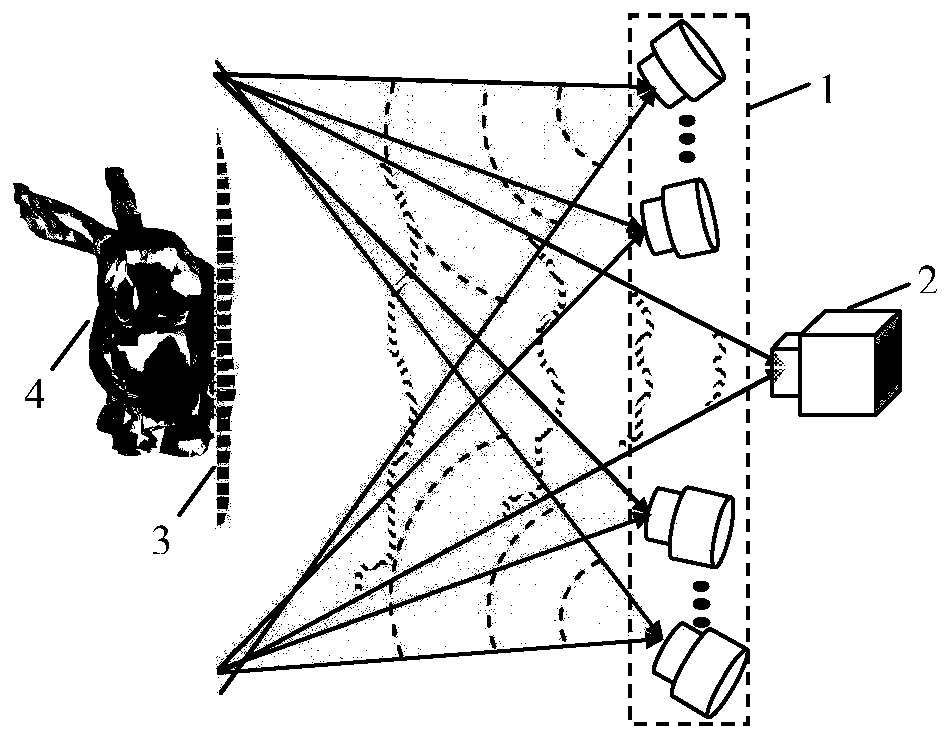
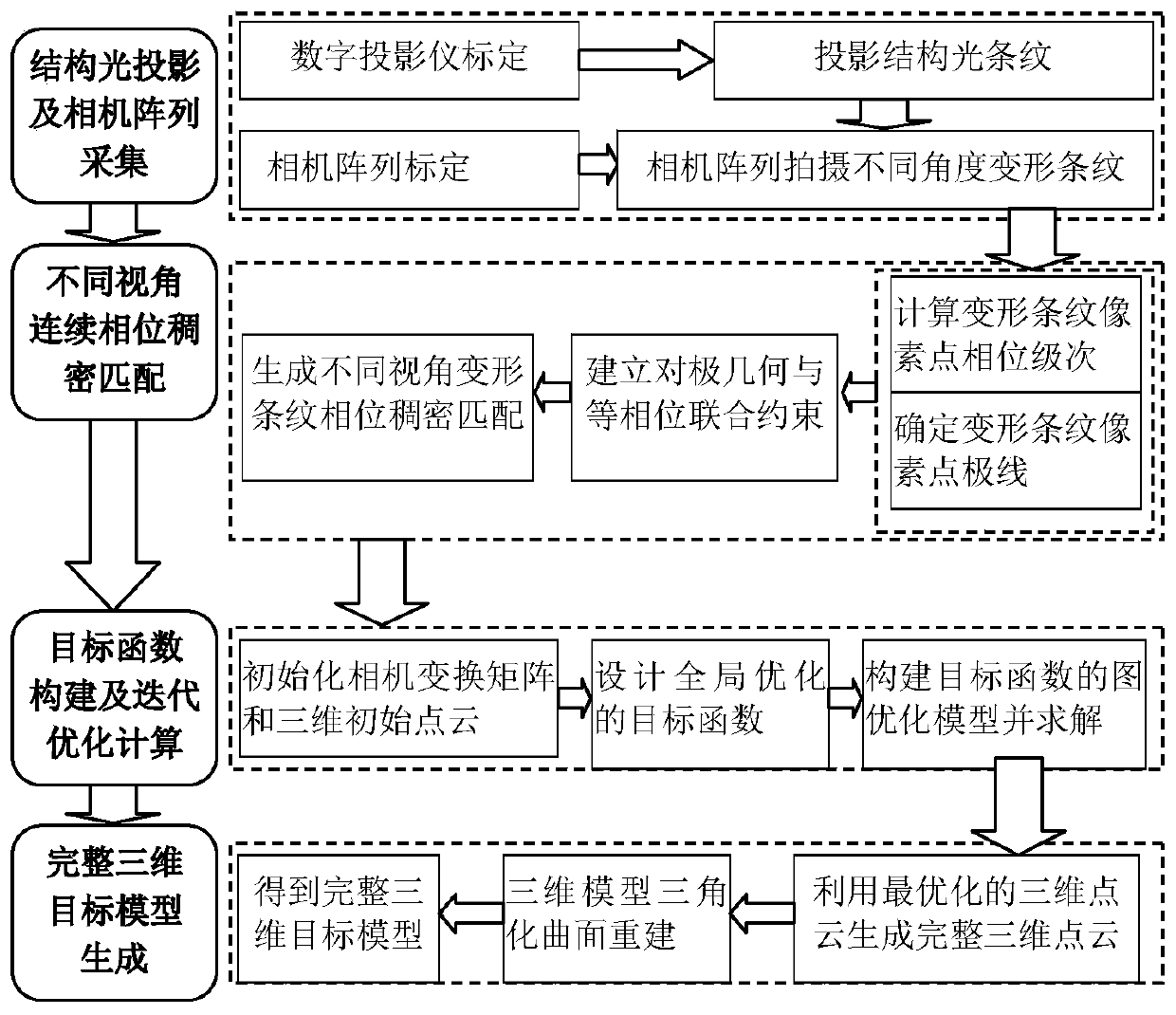
[0019] refer to figure 1. According to the present invention, the three-dimensional reconstruction optimization method includes four processes of structured light projection and camera array 1 acquisition, continuous phase dense matching at different viewing angles, objective function const...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More