

Training task generation method of upper limb rehabilitation robot based on impedance variable demonstration learning
A rehabilitation robot and variable impedance technology, applied in the field of rehabilitation training, can solve the problem of not considering the interaction force and impedance information between the patient and the upper limb rehabilitation robot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0045] The active motion training strategy referred to in the present invention requires the upper limb rehabilitation robot to be in a compliant control mode, and the human can freely drive the mechanical arm to move. Here, the therapist / technician cooperates with the upper limb rehabilitation robot to teach the task, and the position information and human-computer interaction force information of the upper limb rehabilitation robot at time t are respectively recorded as x t and
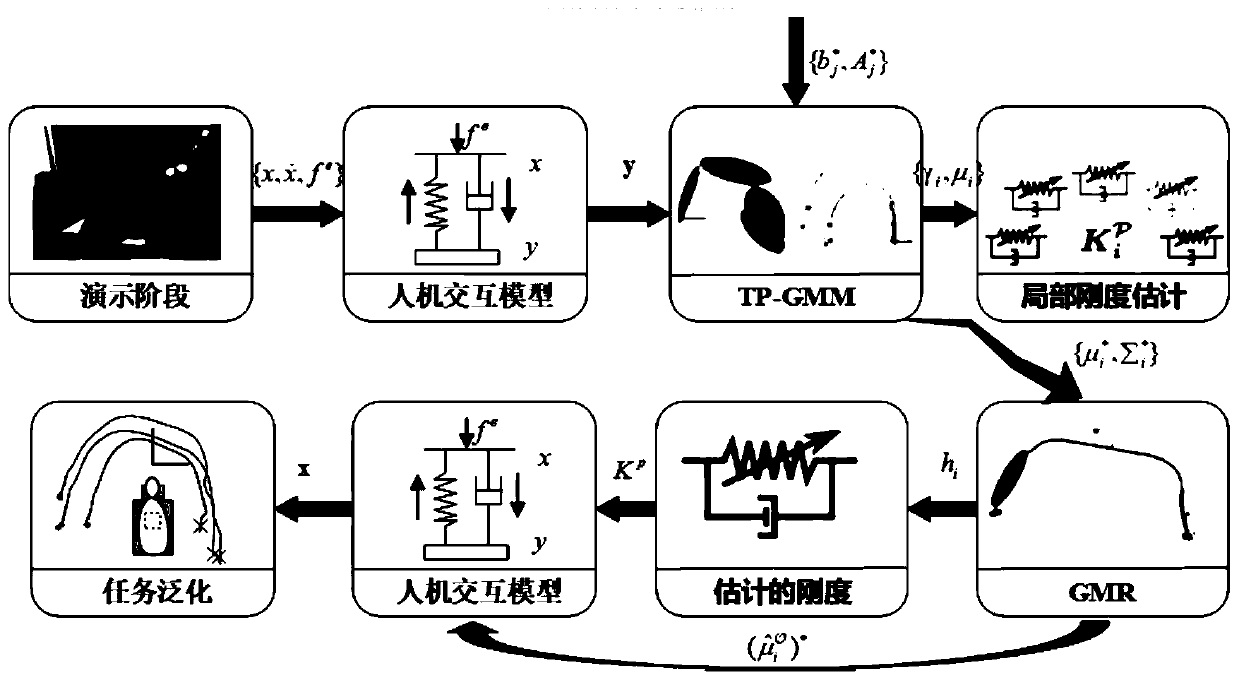
[0046] Such as figure 1 As shown, the present invention proposes a method for generating training tasks for upper limb rehabilitation robots based on variable impedance demonstration learning, including the following steps:
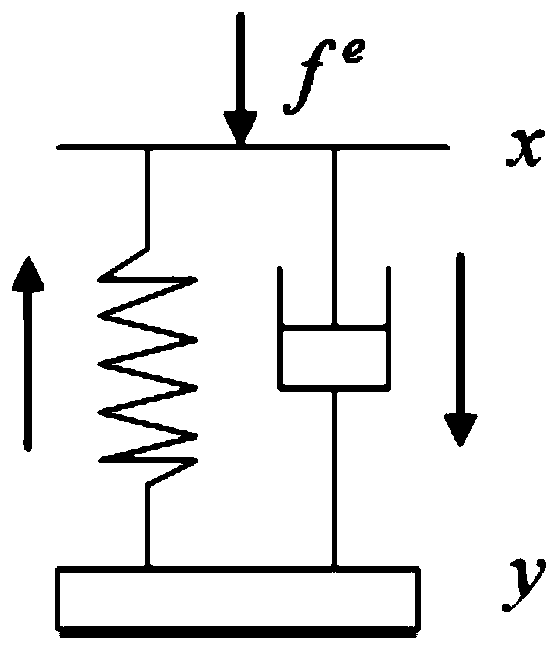
[0047] (1) Human-computer interaction model:
[0048] Assume that the interaction model between human and upper limb rehabilitation ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More