

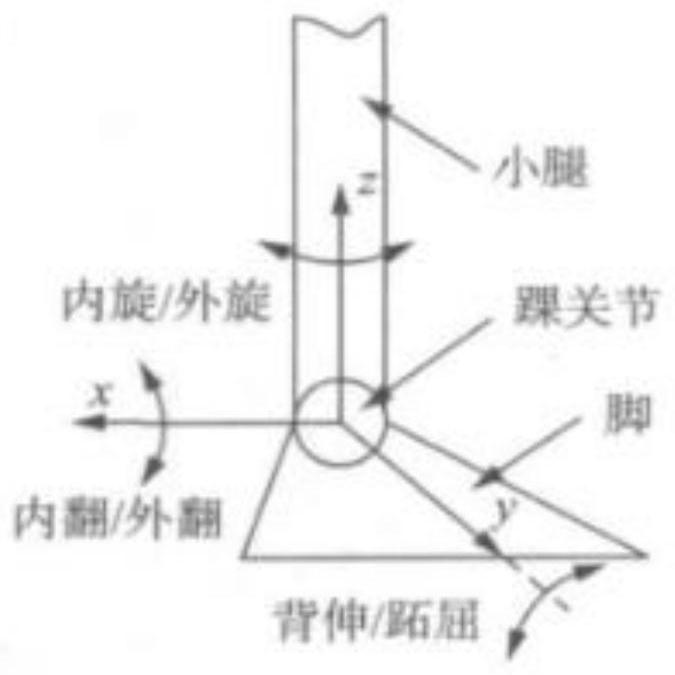
A multi-degree-of-freedom ankle joint intelligent rehabilitation device
A kind of rehabilitation equipment and ankle joint technology, applied in passive exercise equipment, medical science, physical therapy, etc., can solve the problems of unexpected ankle joint movement, ankle joint misalignment, and difficulty in effectively realizing ankle joint rehabilitation training, etc., to achieve The effect of increasing effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments. However, it should be understood that the accompanying drawings are provided only for better understanding of the present invention, and they should not be construed as limiting the present invention.
[0047] It should be noted that all directional indications (such as up, down, left, right, front, back...) in this embodiment are only used to explain the relationship between the components in a certain posture (as shown in the accompanying drawing). If the specific posture changes, the directional indication will also change accordingly.
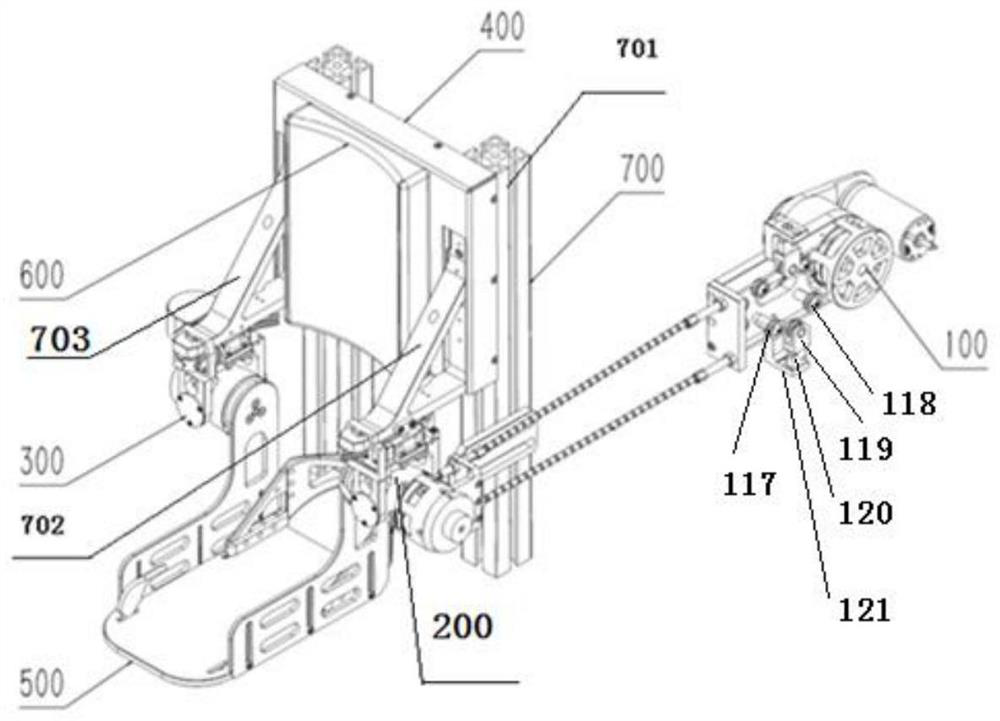
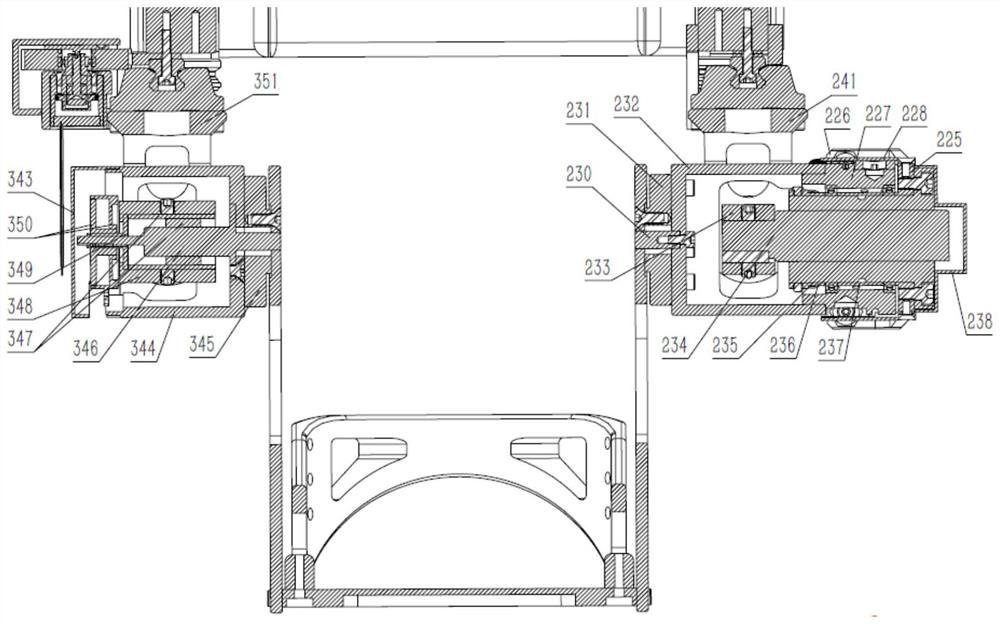
[0048] Such as figure 2 As shown, the present invention provides a multi-degree-of-freedom ankle joint intelligent rehabilitation device, which includes plantar dorsiflexion drive assembly 100, left follower assembly 200, right follower assembly 300, foot plate wearable assembly 500, calf wearable assembly 600 and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More