

A robot tactile servo control method for milling of easily deformable structures
A technology of servo control and milling processing, which is applied in the direction of metal processing machinery parts, metal processing, metal processing equipment, etc., can solve the problems of easy deformation of the structure, damage of milling results, low rigidity, etc., to improve accuracy and safety, The effect of strong flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0038] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings.
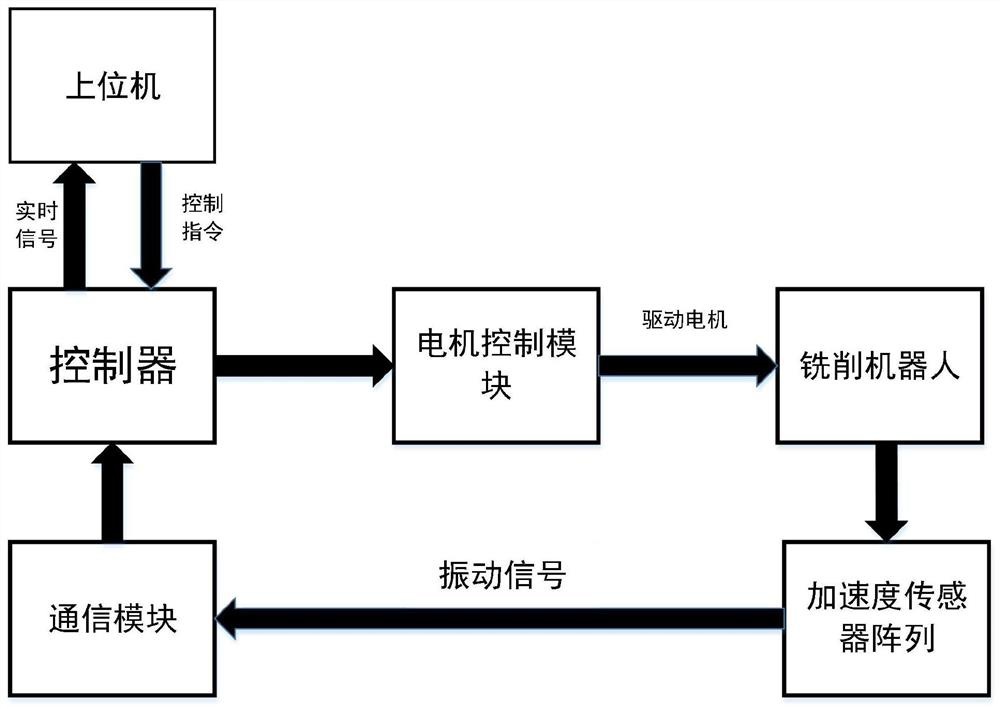
[0039] Such as figure 1 The robot tactile servo control system for milling of easily deformable structures is shown. The system includes a milling robot equipped with milling tools, an accelerometer sensor array module, a communication module, a controller, a motor control module and a host computer: milling The vibration signal is collected by the accelerometer sensor array module and then transmitted to the controller by the communication module. The controller executes the control algorithm to generate the result and transmits it to the motor drive module, and then the motor drive module controls the movement of the robot to keep the milling depth constant. At the same time The controller will also be transmitted to the host computer, which displays the milling status in real time and can send instructions to control the operation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More