Table tennis ball serving robot, table tennis ball serving method and computer readable storage medium
A table tennis and robot technology, applied in the field of robotics, can solve the problems of small swing amplitude, neglect of rotation angular velocity, and less freedom of swing arm, and achieve speed and rotation speed, reduce driving requirements, and large range of motion. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
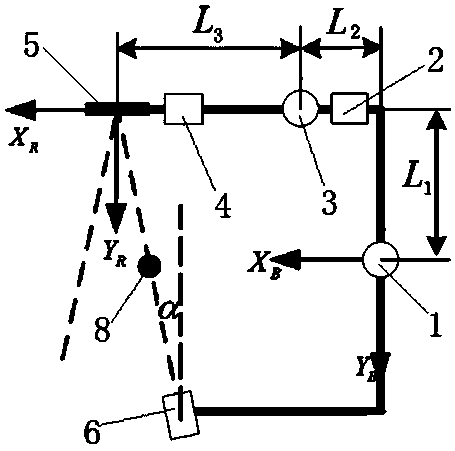
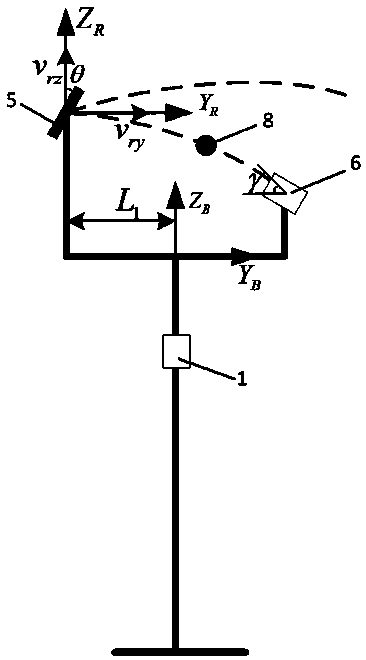
[0044] The table tennis serving robot of the present embodiment includes a waist, a left hand, and a right hand, and the left hand includes a ball spit device 6, and the right hand includes a racket 5, and the right hand has multiple degrees of freedom;
[0045] The ball spit device 6 spits the ball obliquely towards the racket 5;
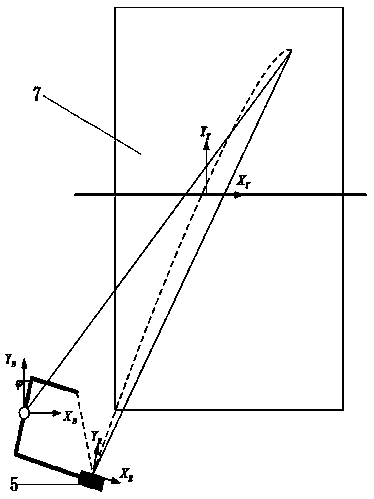
[0046] The table tennis serving robot controls the waist action and controls the right hand action according to the preset serving strategy, so that the table tennis ball 8 rotates at the desired rotational angular velocity after the racket hits the ball, and simultaneously makes the table tennis ball 8 move toward the desired landing point with the desired forward speed.
[0047]Optionally, the waist includes the first joint 1, and the right hand includes the second joint 2, the third joint 3, and the fourth joint 4, and the control of the waist action includes controlling the angle of the first joint 1, and the control of the right hand Actions i...
Embodiment 2
[0090] This embodiment is a method for serving a table tennis ball using the table tennis serving robot described in Embodiment 1. The method includes:
[0091] Configure the attribute parameters of the robot;
[0092] Set the expected parameters of the table tennis;
[0093] Calculate the control parameters of the robot;
[0094] The ball throwing operation is performed according to the attribute parameters of the robot, and the ball hitting operation is performed according to the control parameters of the robot, so that the table tennis ball after hitting the ball has expected parameters.
[0095] Optionally, the attribute parameters of the configuration robot include: configuring the speed and angle of the table tennis ball spit out by the ball-spitting device; The ball's desired rotational angular velocity and desired forward velocity.
[0096] Optionally, the calculation of the control parameters of the robot includes: a constraint relationship based on the transformat...
Embodiment 3
[0112] This embodiment provides a computer-readable storage medium, on which a computer program is stored, and when the computer program is executed by a processor, the method described in Embodiment 2 is implemented.
[0113] The present invention mainly proposes a corresponding serving control method based on a table tennis robot using a racket to serve, so as to realize more anthropomorphic and intelligent serving. The present invention firstly configures the appropriate table tennis incident velocity according to the requirements, secondly obtains the reflection velocity of the table tennis ball after being hit by the racket according to the expected landing point, expected forward velocity and expected rotational angular velocity, and secondly uses the collision model of the table tennis racket to obtain the speed and velocity of the racket Then, according to the configuration of the table tennis serving robot, the angle and speed of each joint are obtained, and finally ea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More