

Control system and control method of wall-climbing robot
A wall-climbing robot and control system technology, applied in the field of robotics, can solve problems such as harsh working environment, great impact on workers' health, long preparation time, etc., and achieve the effect of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The following are specific embodiments of the present invention and in conjunction with the accompanying drawings, the technical solutions of the present invention are further described, but the present invention is not limited to these embodiments.
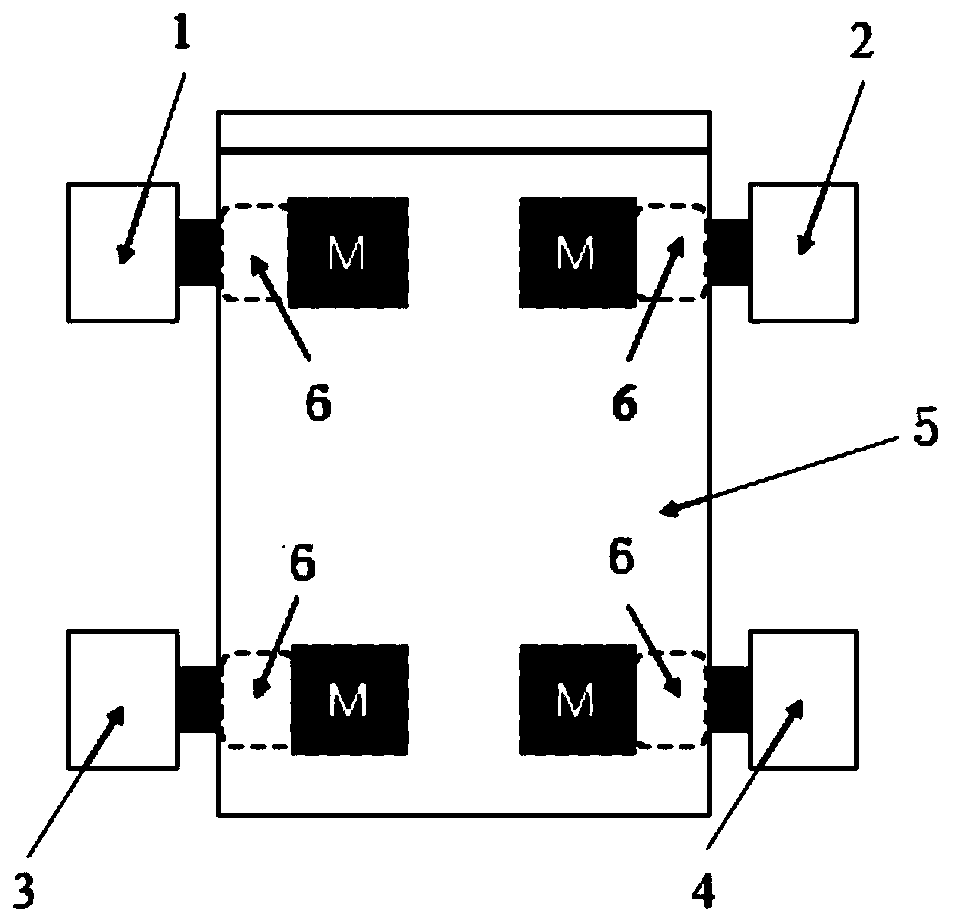
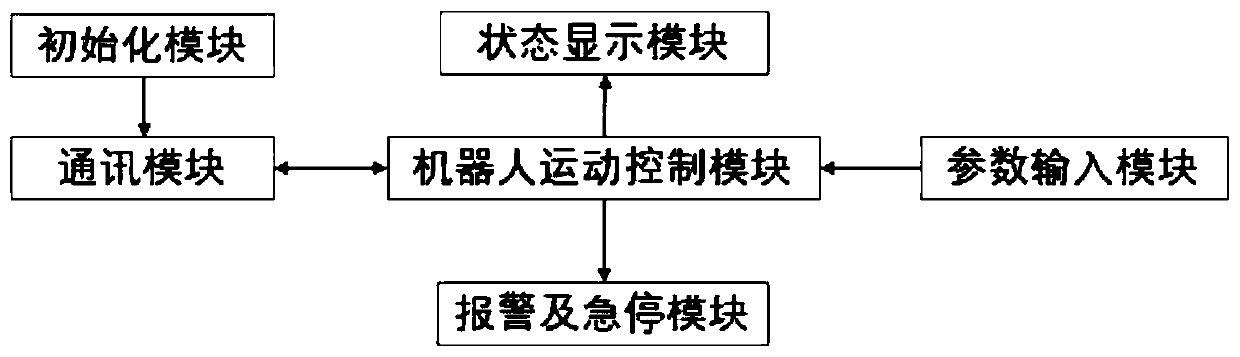
[0035] Such as Figure 1-2 As shown, in the control system of the wall-climbing robot, the wall-climbing robot includes a left front magnetic wheel 1, a right front magnetic wheel 2, a left rear magnetic wheel 3, a right rear magnetic wheel 4 and a fuselage, a left front magnetic wheel 1, a right front magnetic wheel 2. The left rear magnetic wheel 3 and the right rear magnetic wheel 4 are respectively embedded with permanent magnets that can be adsorbed on the steel wall, and the left front magnetic wheel 1, the right front magnetic wheel 2, the left rear magnetic wheel 3 and the right rear magnetic wheel 4 respectively pass The drive motor 6 is connected with the fuselage, and the control system includes an initializatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More