

Modular reconfigurable underwater robot
An underwater robot and modular technology, applied in the field of robots, can solve the problems of single functional load and inability to achieve multiple tasks with one machine, and achieve the effects of high speed, high propulsion efficiency and strong stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below in conjunction with the accompanying drawings. The technical features of the various implementations in the present invention can be combined accordingly on the premise that there is no conflict with each other.
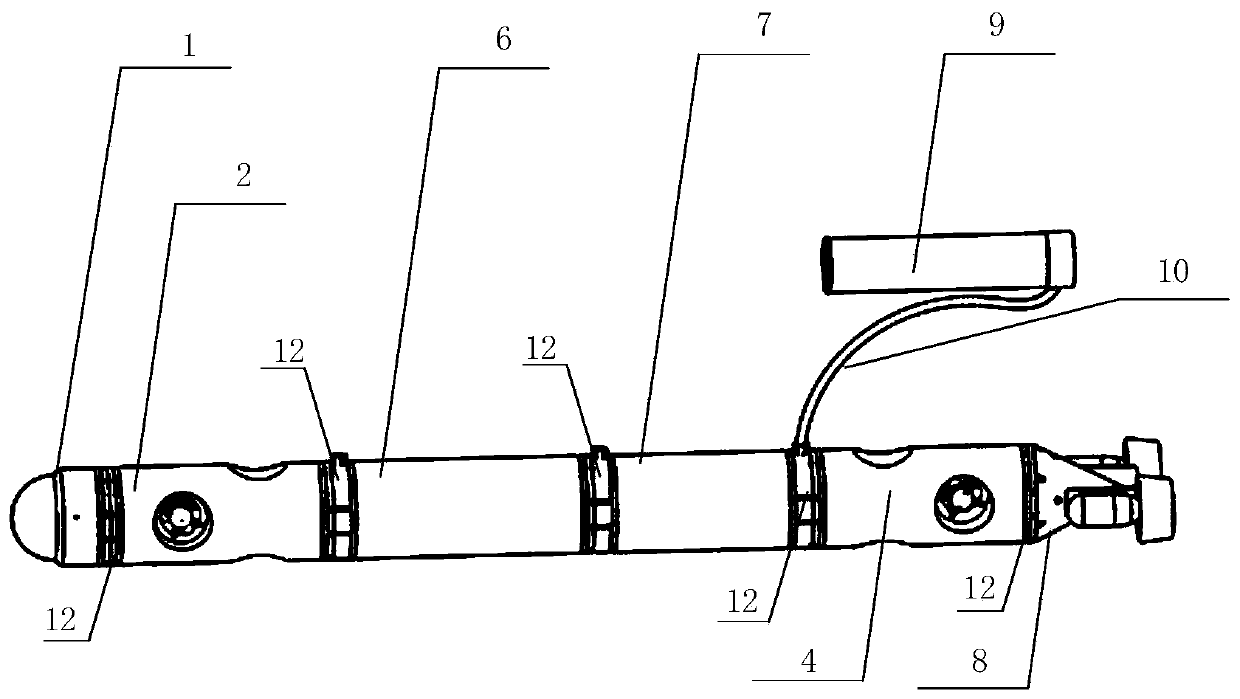
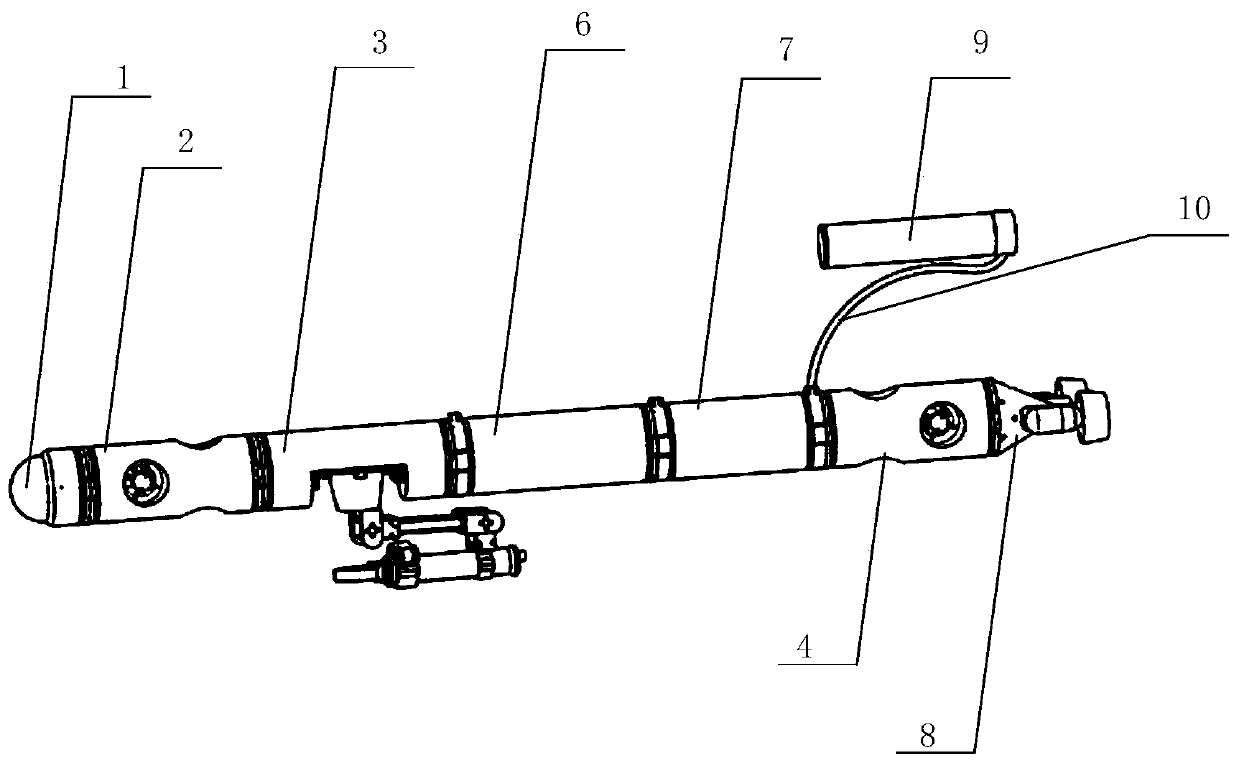
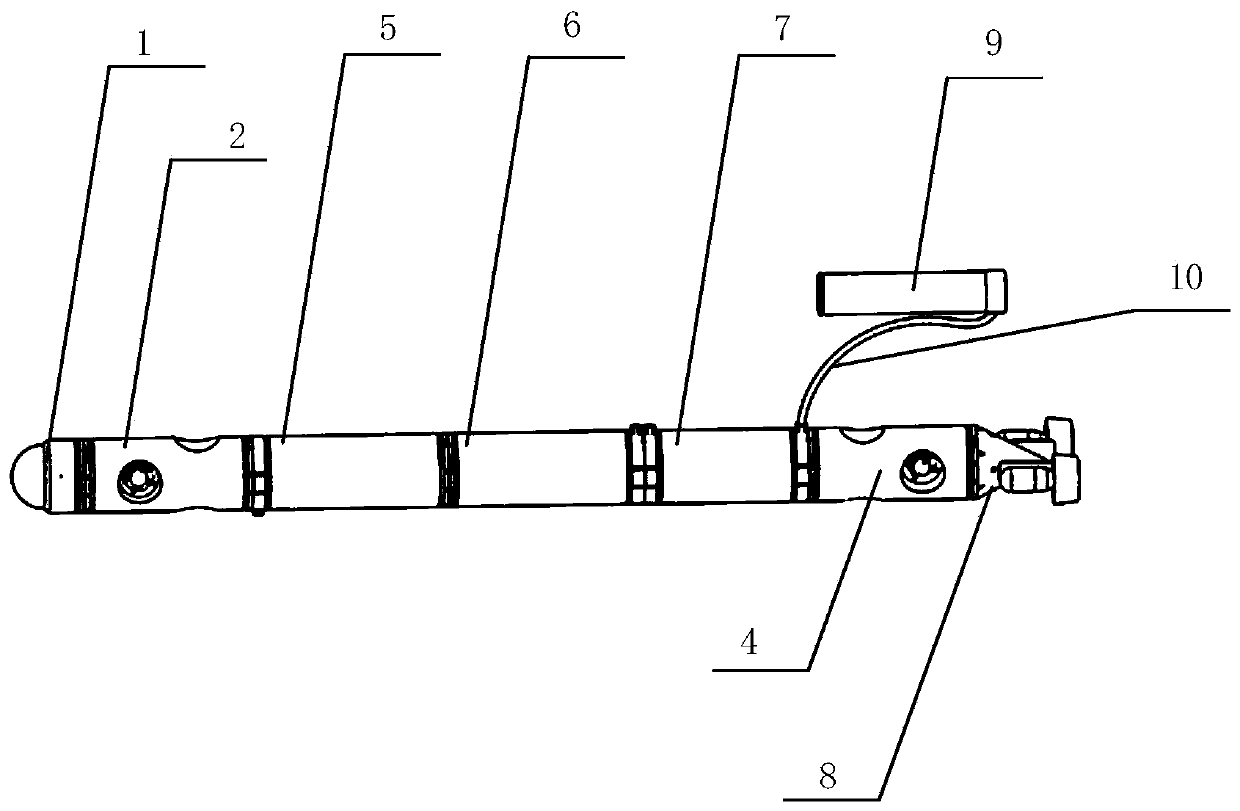
[0040] Such as figure 1 As shown, a modular reconfigurable underwater robot includes a signal buoy 9 and several module cabins connected end-to-end through a connection assembly 12: camera cabin 1, first propeller cabin 2, battery cabin 6, control cabin 7, the second thruster cabin 4 and the tail propulsion cabin 8; the signal buoy 9 communicates with the module cabin through the zero-buoyancy communication line 10.
[0041] The camera cabin 1 is located at the head of the whole machine and is used to take underwater videos or pictures; the tail propulsion cabin 8 is located at the tail of the whole machine and is used to push the whole machine forward and backward; the first The thruster cabin 2 and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More