Software robot or driver system based on digital twin five-dimensional model and modeling method thereof
A robot and driver technology, applied in the field of software robot or driver system and its modeling based on digital twin five-dimensional model, can solve the problems of inflexible movement of ordinary robots, difficult to control, inconvenient to display in real time, predict working conditions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0044] The present invention will be described in further detail below in conjunction with specific examples, but not as a limitation of the present invention.
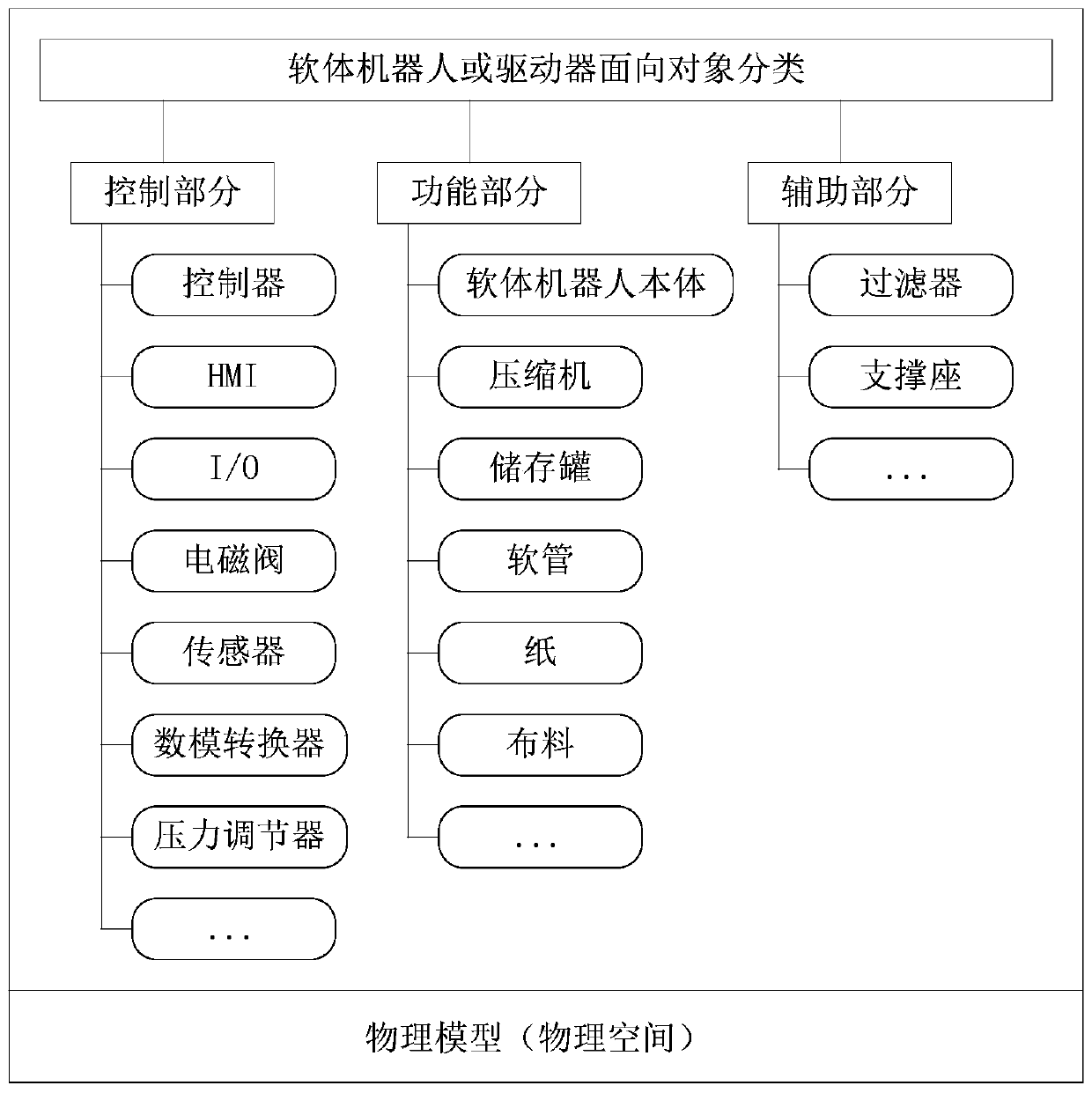
[0045] Such as figure 1 As shown, this embodiment provides a soft robot or driver system based on a digital twin five-dimensional model, including a physical model, a virtual model, a twin data information link, and a service system; the physical model, the virtual model, and the service system are connected by The twin data information chain is connected, and the twin data is transmitted through the twin data information chain.
[0046] Wherein, the physical model includes a soft robot or a driver body, a sensor and a control system, and the sensor is installed on the soft robot or the driver body; the sensor is connected to the control system through different data interfaces; the control system is related to each other through the twin data information link Data collection and signal transmission, control the move...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com