

Modular magnetic type auxiliary robot based on wireless communication and using method of modular magnetic type auxiliary robot based on wireless communication
A wireless communication and modular technology, applied in the field of robotics, can solve problems such as damage to manipulator parts, slowing down the disaster relief process, falling fragments, etc., to reduce friction, reduce waste, and prolong damage time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
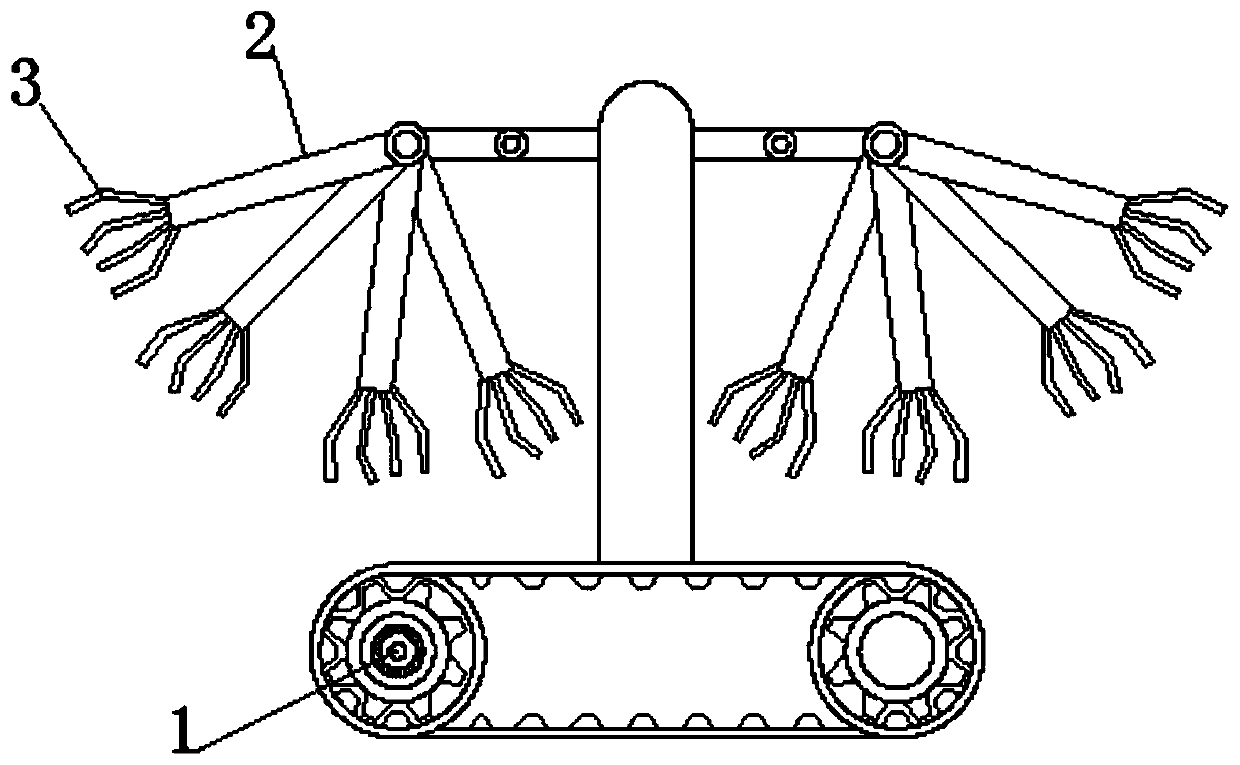
[0046] see figure 1 , a modular magnetic auxiliary robot based on wireless communication, including a robot body 1 with a main control box. The mechanical finger 3 at the end of the connecting arm 2 and the electric rotating shaft are fixedly connected with the main control box through a wireless signal.
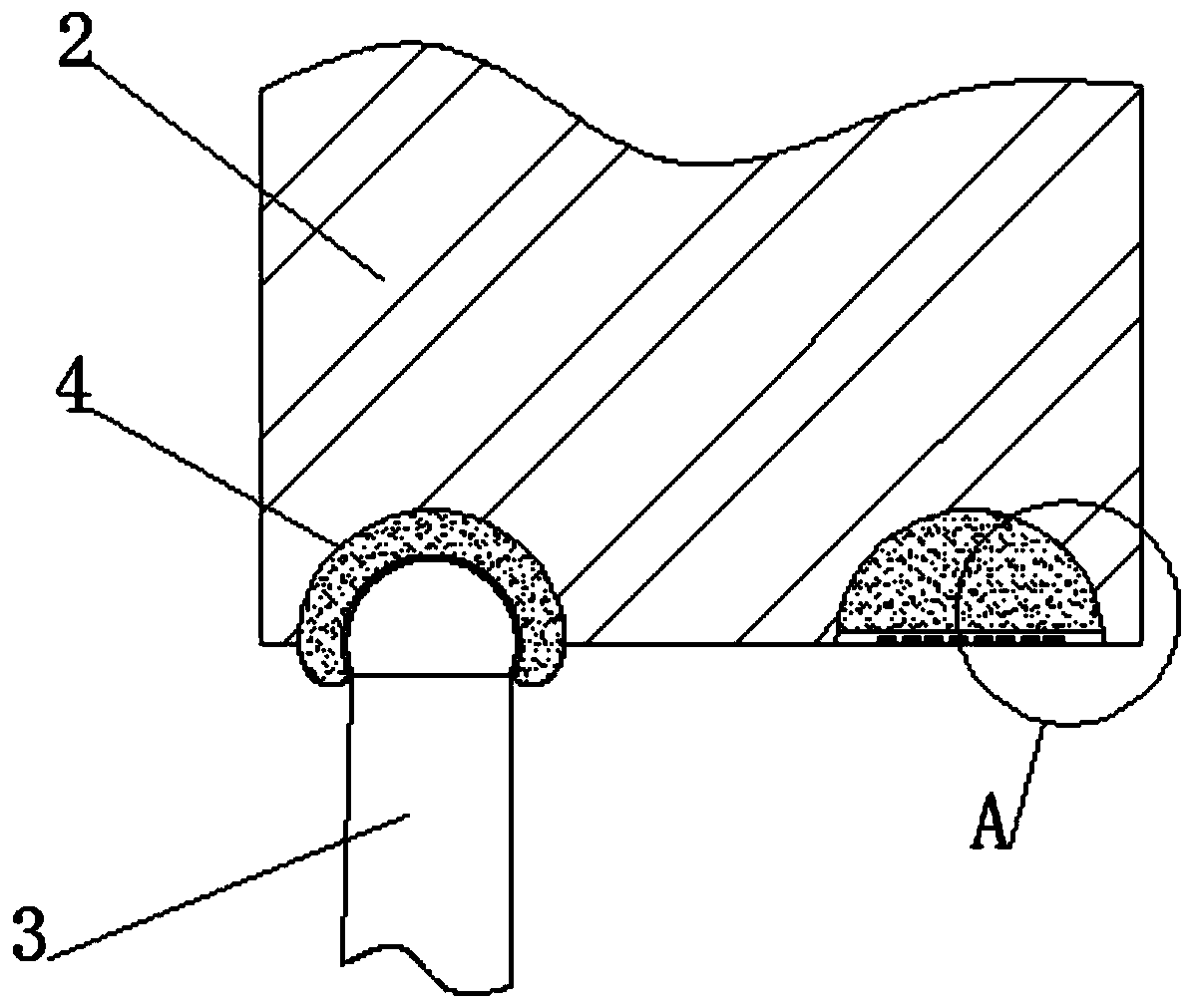
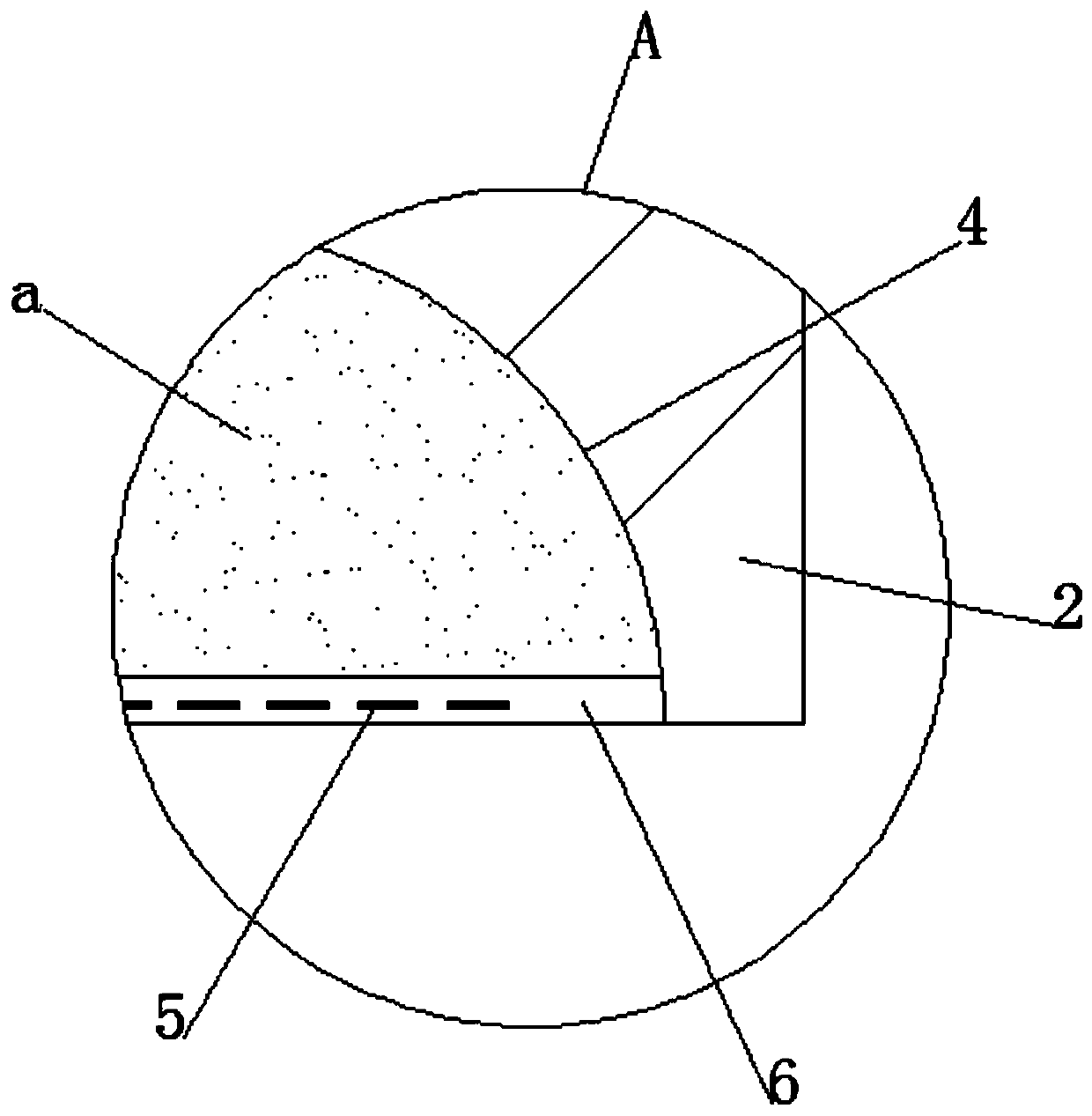
[0047] see Figure 2-3 , image 3 The middle a represents the electrorheological fluid, the lower end of the connecting arm 2 is dug with a plurality of hemispherical grooves 4, and the notches of the hemispherical grooves 4 are fixedly connected with a flat wrapping bag 6, and the inside of the flat wrapping bag 6 is inlaid with a plurality of evenly distributed internal repelling blocks 5, The gap between the flat wrapping bag 6 and the hemispherical groove 4 is filled with electrorheological fluid, and the inside of the connecting arm 2 is embedded with a wire, one end of which extends into the hemispherical groove 4, and the other end of the wire is connected to the ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More