

Mobile robot obstacle avoidance method based on neural network
A technology of mobile robot and neural network, which is applied in the field of obstacle avoidance of mobile robot based on neural network, and can solve problems such as robot collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
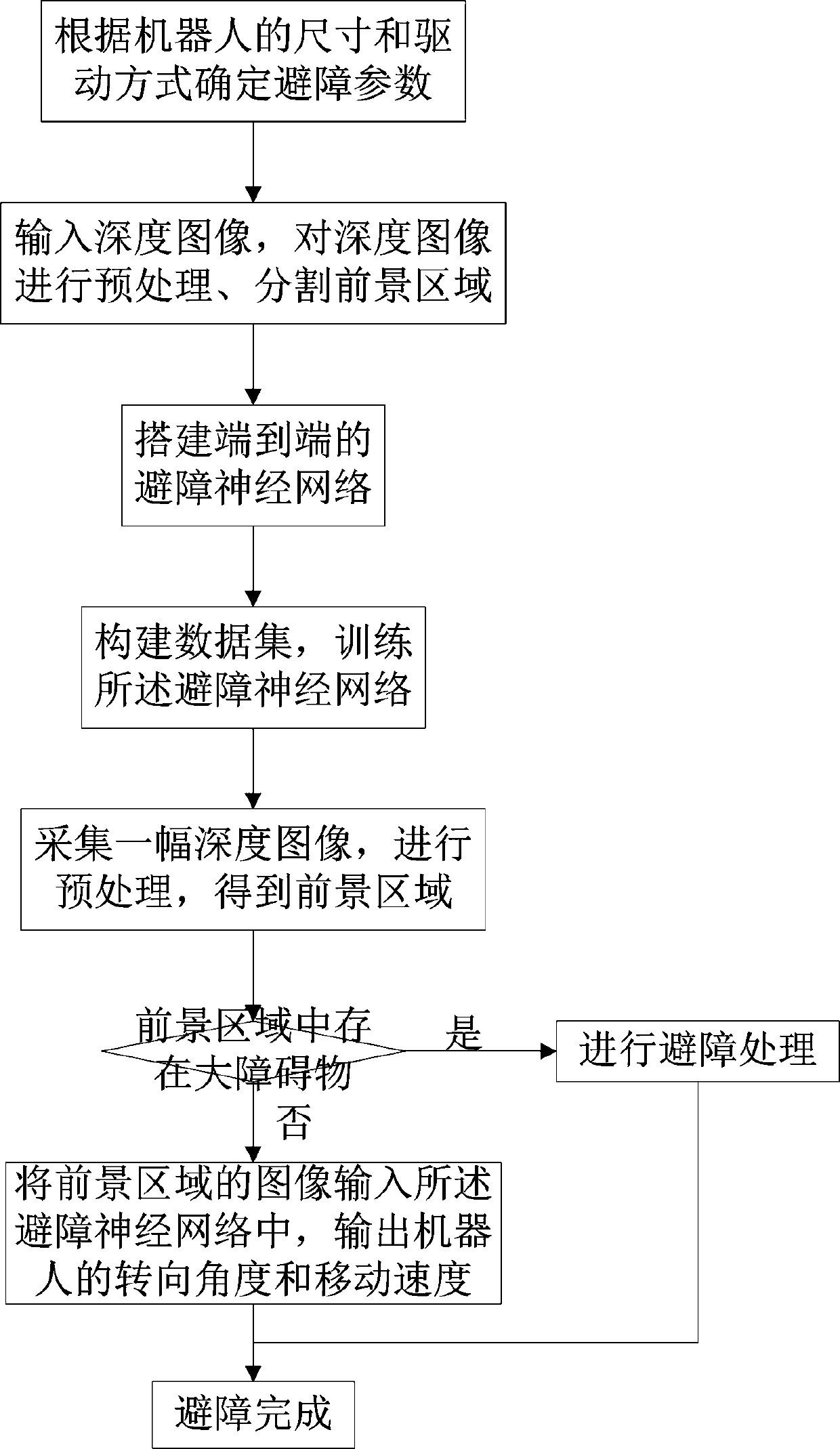
[0058] The present invention will be described in detail below in conjunction with examples and accompanying drawings, but the present invention is not limited thereto. The realization of the mobile robot obstacle avoidance method of the present invention is based on the robot operating system ROS platform. The robot platform uses a self-made four-wheel mobile robot. The structure of the robot is driven by the rear wheel, and the front wheel is an Ackerman steering mechanism. The rear wheel drive motor is a 24V BLDC (brushless DC motor), the maximum continuous torque: 3N·m, the maximum speed: 469rpm. The front wheel steering is a magnetically encoded 380KG·cm bus servo, which can read the position of the servo.
[0059] The depth camera is Intel RealSense camera, the model is D435i, the computer on the robot uses Inteli7-6700HQ, 16GB RAM, NVIDIAGTX970 (4GB GDDR); the operating system is Ubuntu16.04+ROS Kinetic; the deep learning framework is Pytorch.
[0060] Such as figure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More