

Unmanned aerial vehicle full-area reconnaissance path planning method of unsupervised learning type neural network
An unsupervised learning and neural network technology, applied in the field of intelligent decision-making of unmanned systems, can solve the problem of missing target information search and other problems, and achieve the effect of good transferability and versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
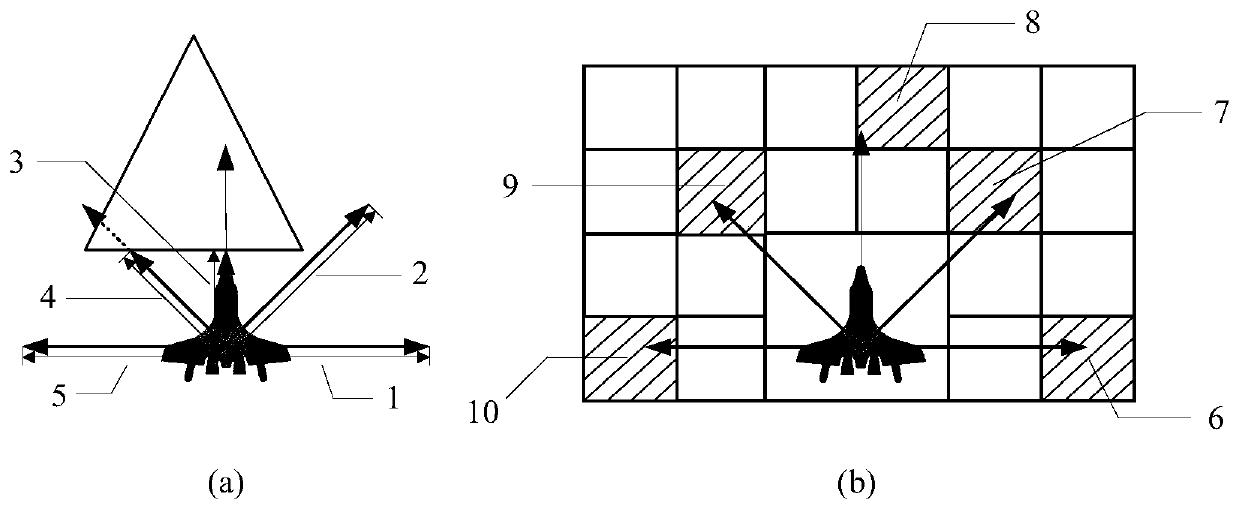
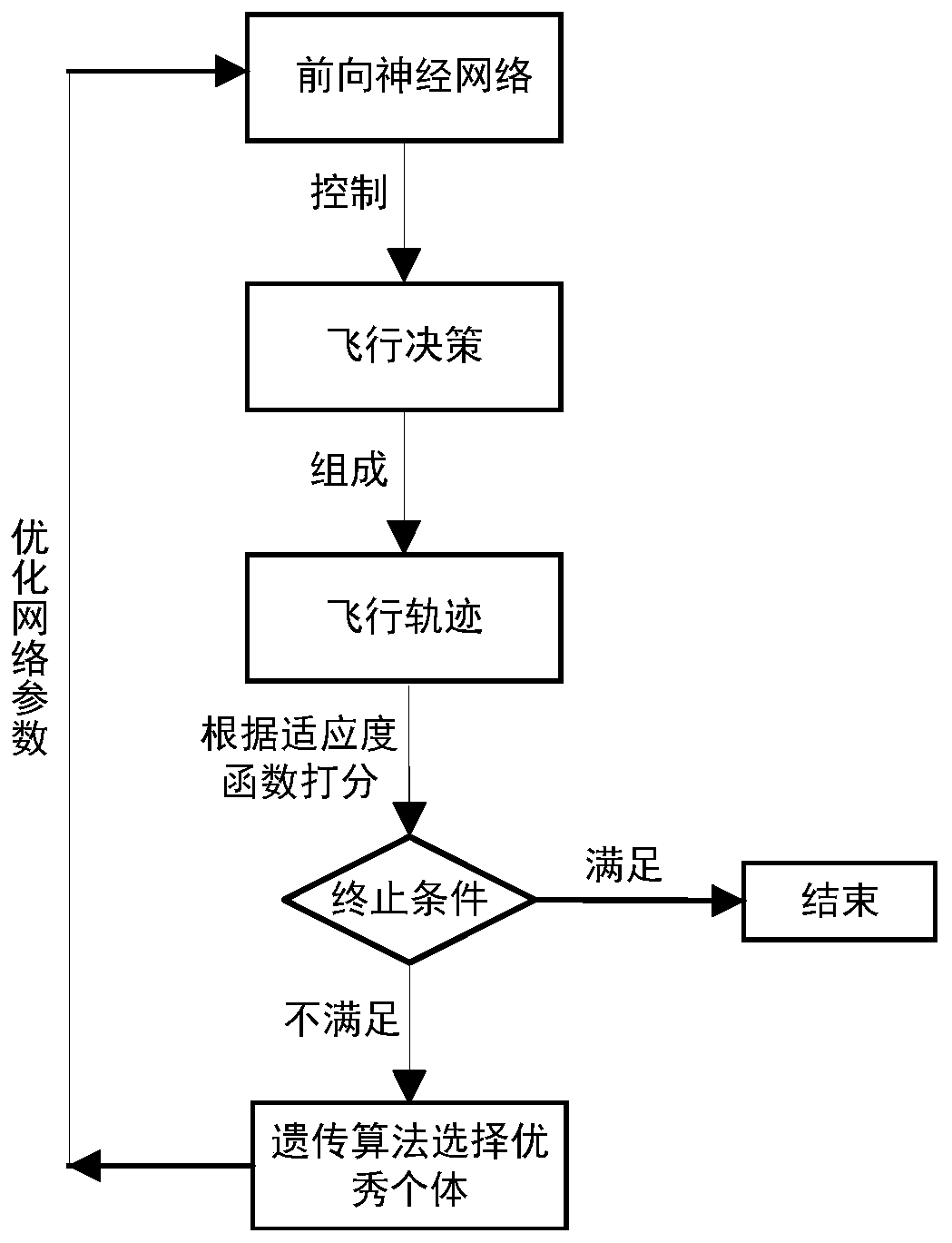
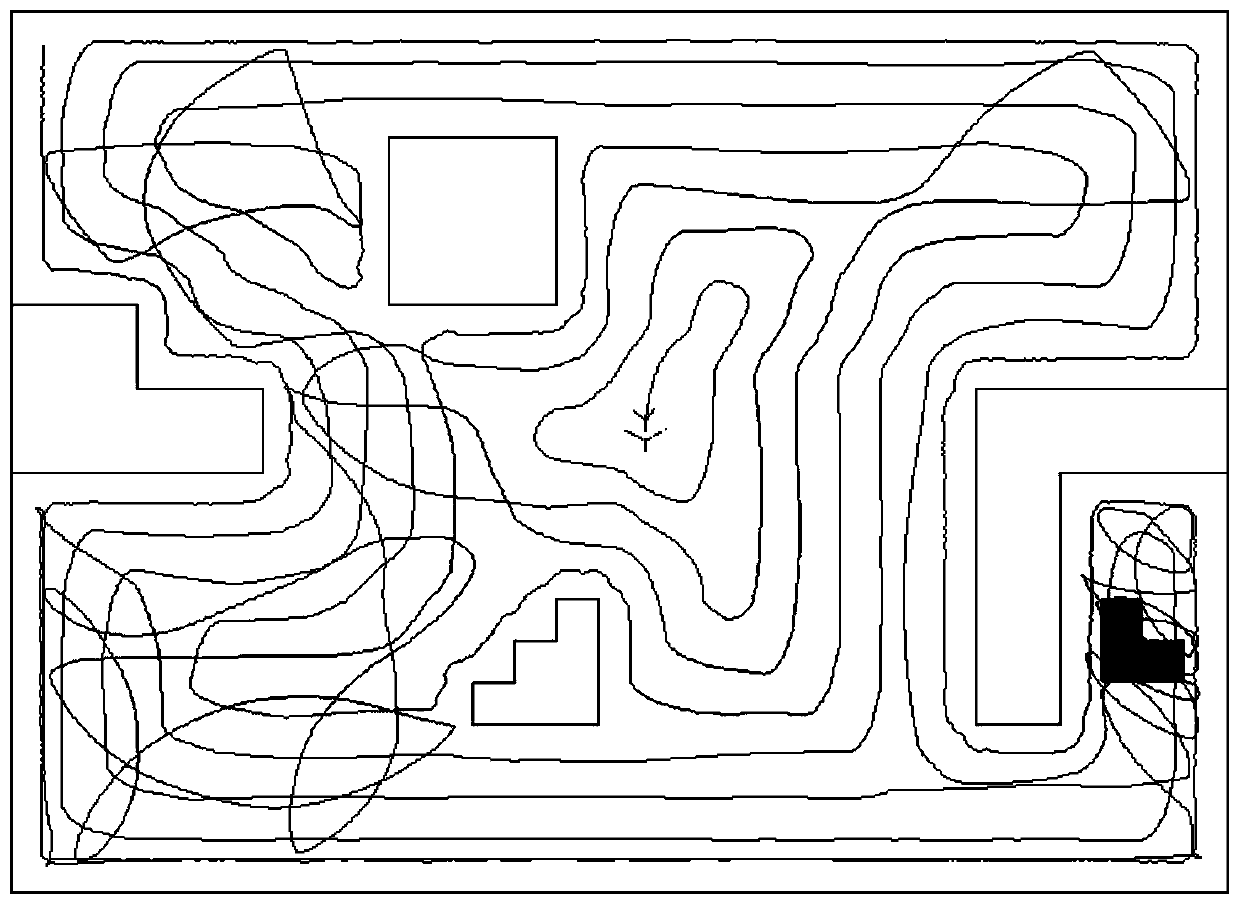
[0091] The present invention adopts the unsupervised training method of the neural network through the genetic algorithm to complete the regional coverage path planning task, mainly including: 1. Constructing the environmental model, the UAV model and the environmental threat constraint model; 2. Setting the threat assessment index, for Evaluate the flight efficiency of the UAV during the execution of the mission; 3. Construct the neural network model, set the adaptive function, and then construct the neural network unsupervised learning model; 4. Based on the constructed global model, train the neural network; 5 .Load the offline learning results of maps with known environmental information, and verify and apply online the maps with unknown environmental information.
[0092] Specifically, model the grid digital map and UAV motion model, use the nonlin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More