

Minimum driving node identification method based on complex network based on complex network strict target controllability
A technology for driving nodes and complex networks, applied in complex mathematical operations, control/regulation systems, program control, etc., to achieve the effect of expanding the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
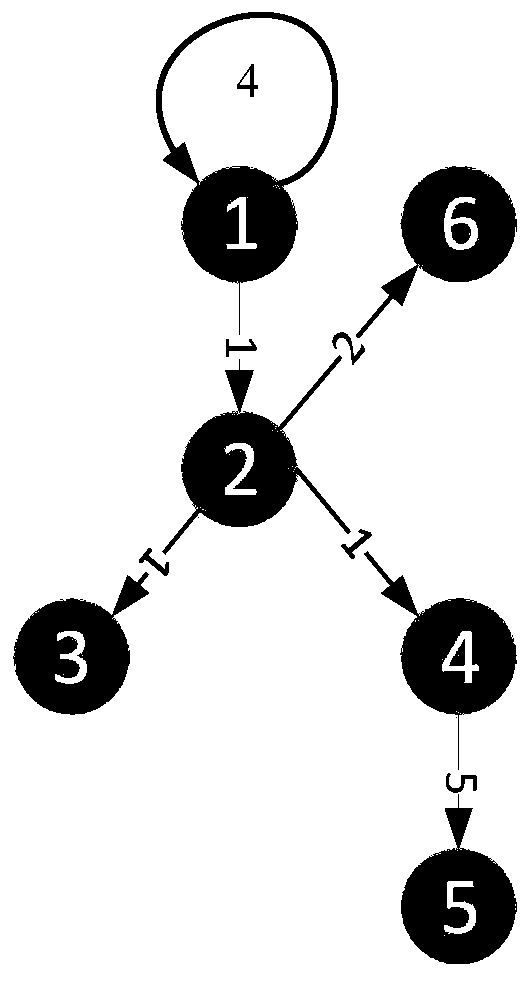
[0032] A least-driven node identification method based on strict target controllability of complex networks. First, we abstract the complex network into a graph topology G(V,E) composed of nodes and edges, where V is the set of nodes, E is the set of edges, and the edge Indicates the coupling relationship between nodes. Nodes that are directly controlled are called driver nodes. We call the matrix representing the coupling relationship of nodes in the network an adjacency matrix.
[0033] PBH rank criterion: the necessary and sufficient condition for the complete controllability of the linear time-invariant system described in formula (1) is
[0034] rank(sI-A,B)=N, or rank(λ i I-A,B)=N, i=1,2,...,N;
[0035] in, is the field of complex numbers, λ i (i=1,2,...,N) is the characteristic value of the system.
[0036] Kalman rank criterio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More