

Accurate positioning and intelligent navigation method for oral implanting robot
An intelligent navigation and precise positioning technology, applied in surgical robots, surgical navigation systems, dental implants, etc., can solve the problems of long opening time for the safety of the robot and the patient's oral cavity collision, insufficient precision of the optical positioning and navigation system, etc. Effects of mandibular joint fatigue, simplified preparation, and improved flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings.
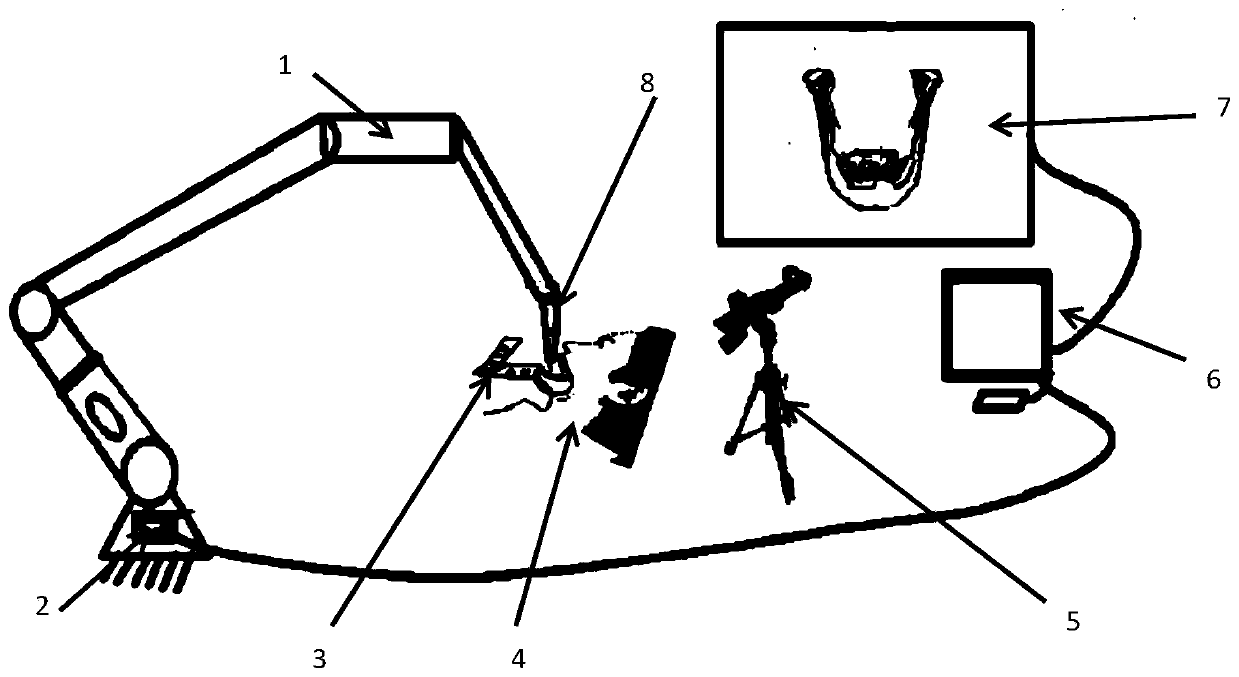
[0039] refer to Figure 1 to Figure 7 , a precise positioning and intelligent navigation method for an oral implant robot, comprising the following steps:
[0040] (1) Planning of digital implant solution
[0041] For patients whose maxillary or mandibular part of the tooth is missing, obtain the CBCT image of the patient's oral cavity and intraoral plaster impression or intraoral scanning data to reconstruct the three-dimensional model of the oral cavity. According to the model data, use digital implant software (such as six-dimensional implant software) to complete the placement of implants in the jaw model, determine the number, position, angle, depth and other parameters of implants, and obtain a three-dimensional implant plan;
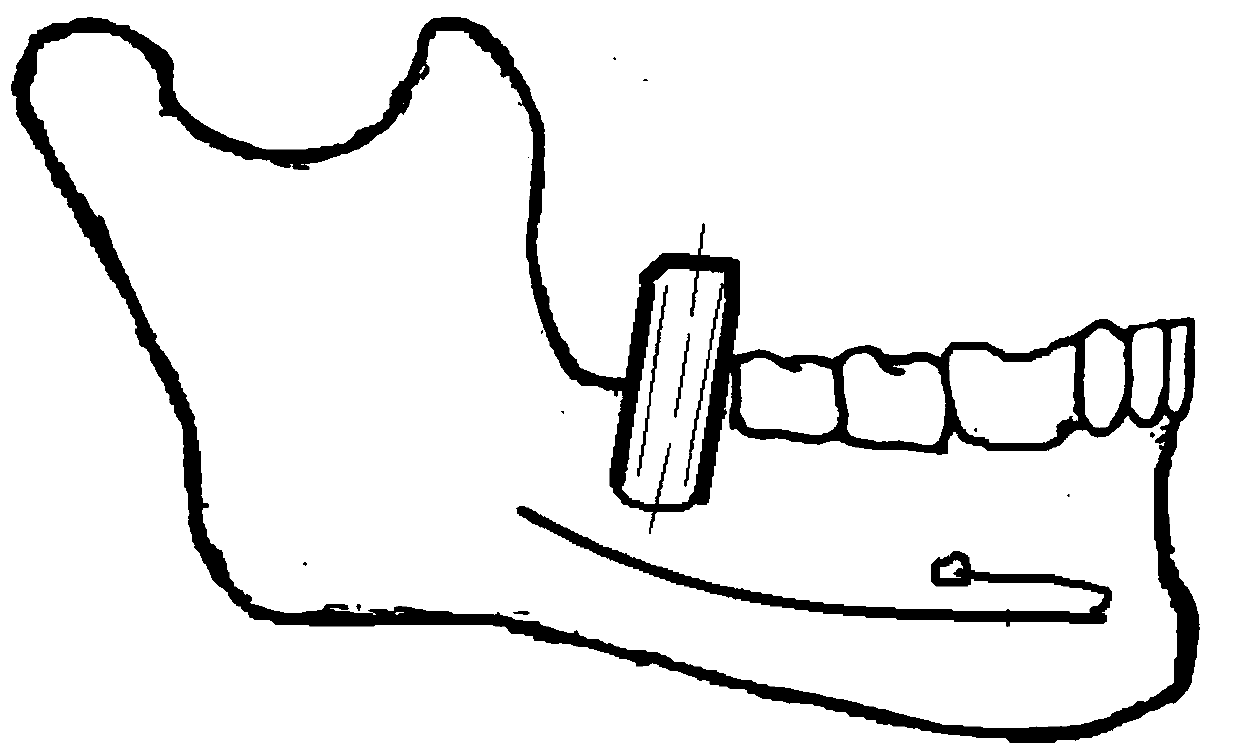
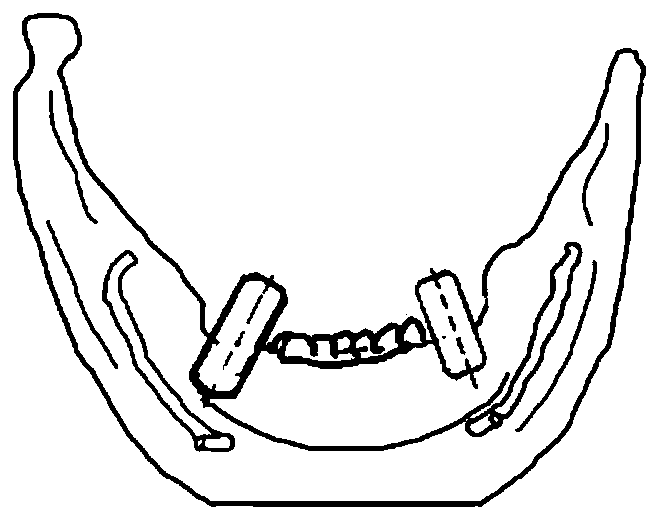
[0042] (2) Design the personalized fixed structure of the positioning marker
[0043] According to the three-dimensional implant plan ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More