

Mechanical simulation device for sitting lumbar vertebra manipulation training based on flexible differential driving
A differential drive and mechanical simulation technology, applied in the field of experimental equipment, can solve the problems of increasing the height of the transmission chain, the influence of the stability of the mechanism, and improving the center of gravity of the mechanism, and achieves the effect of good human-like friendliness, compact structure, and lower work center of gravity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
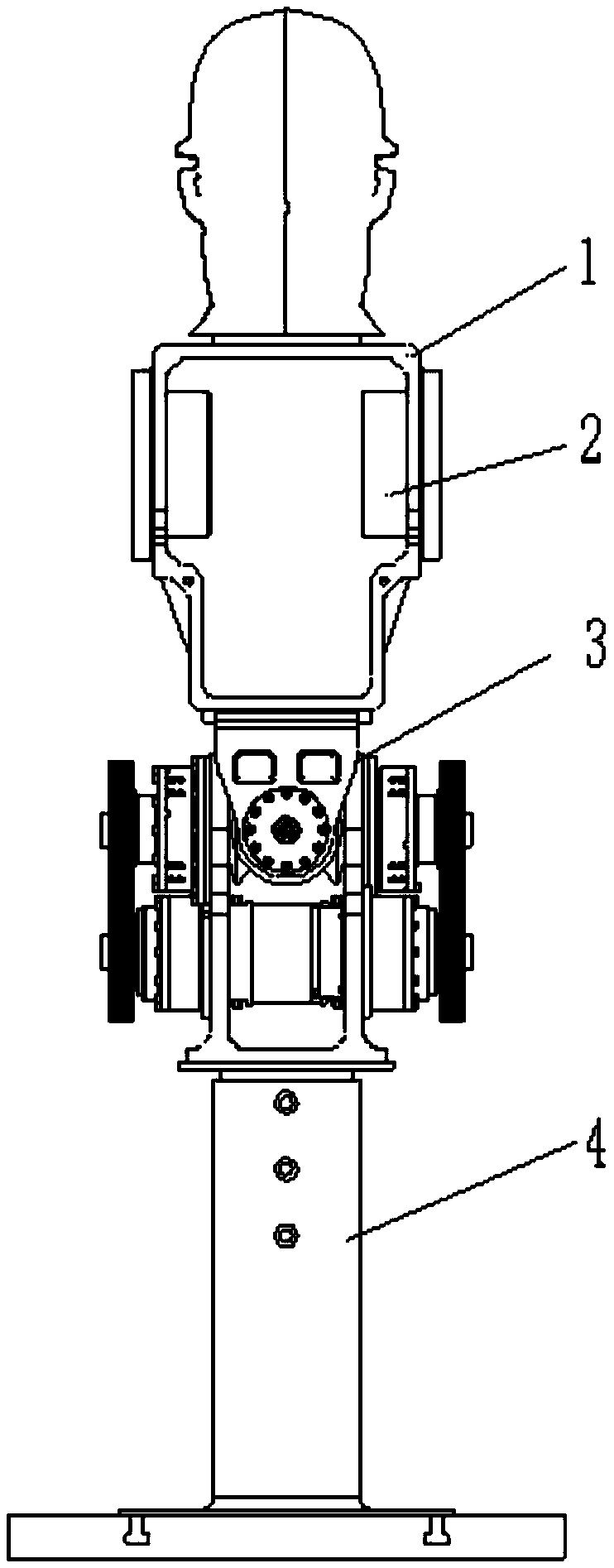
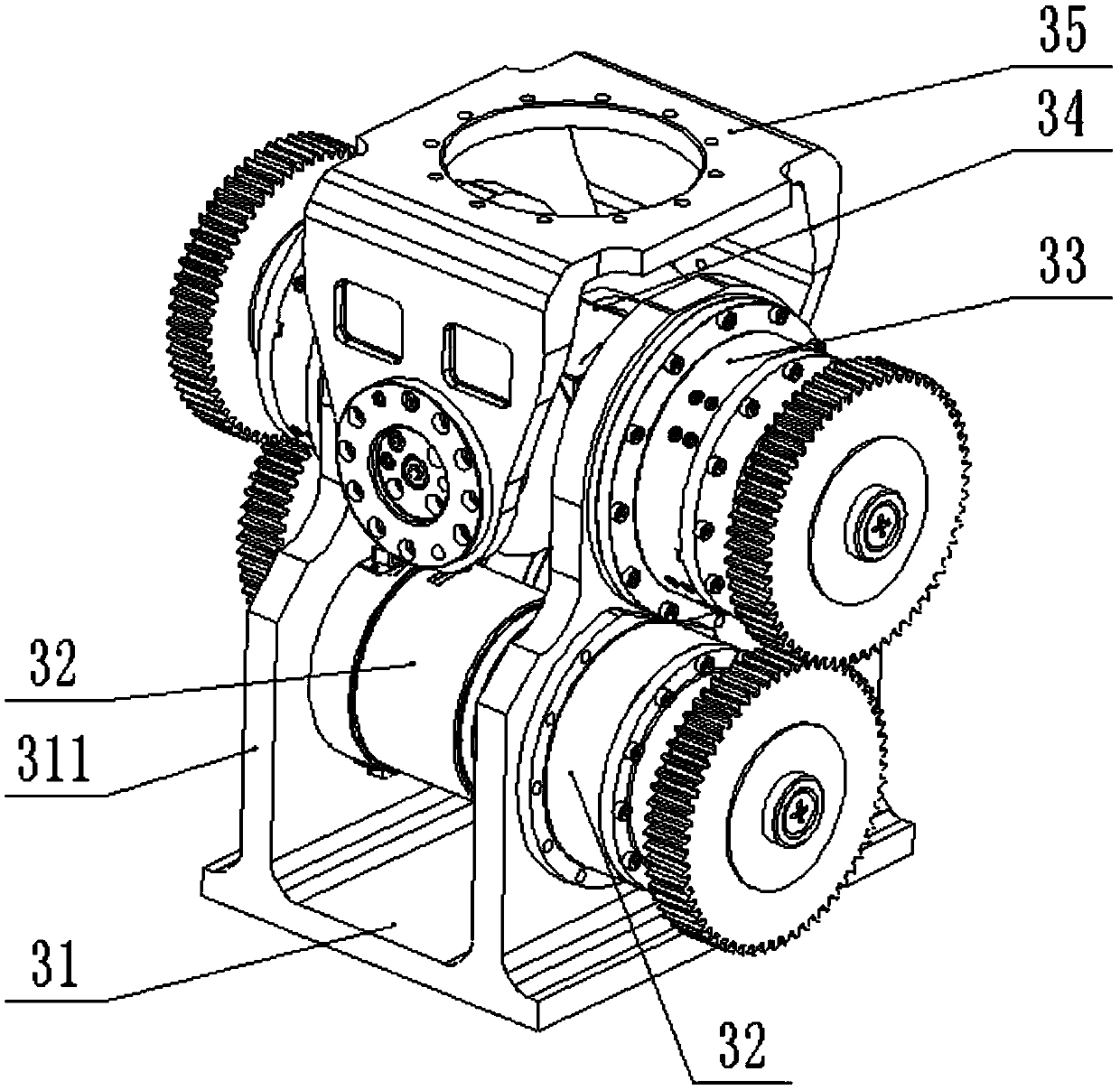
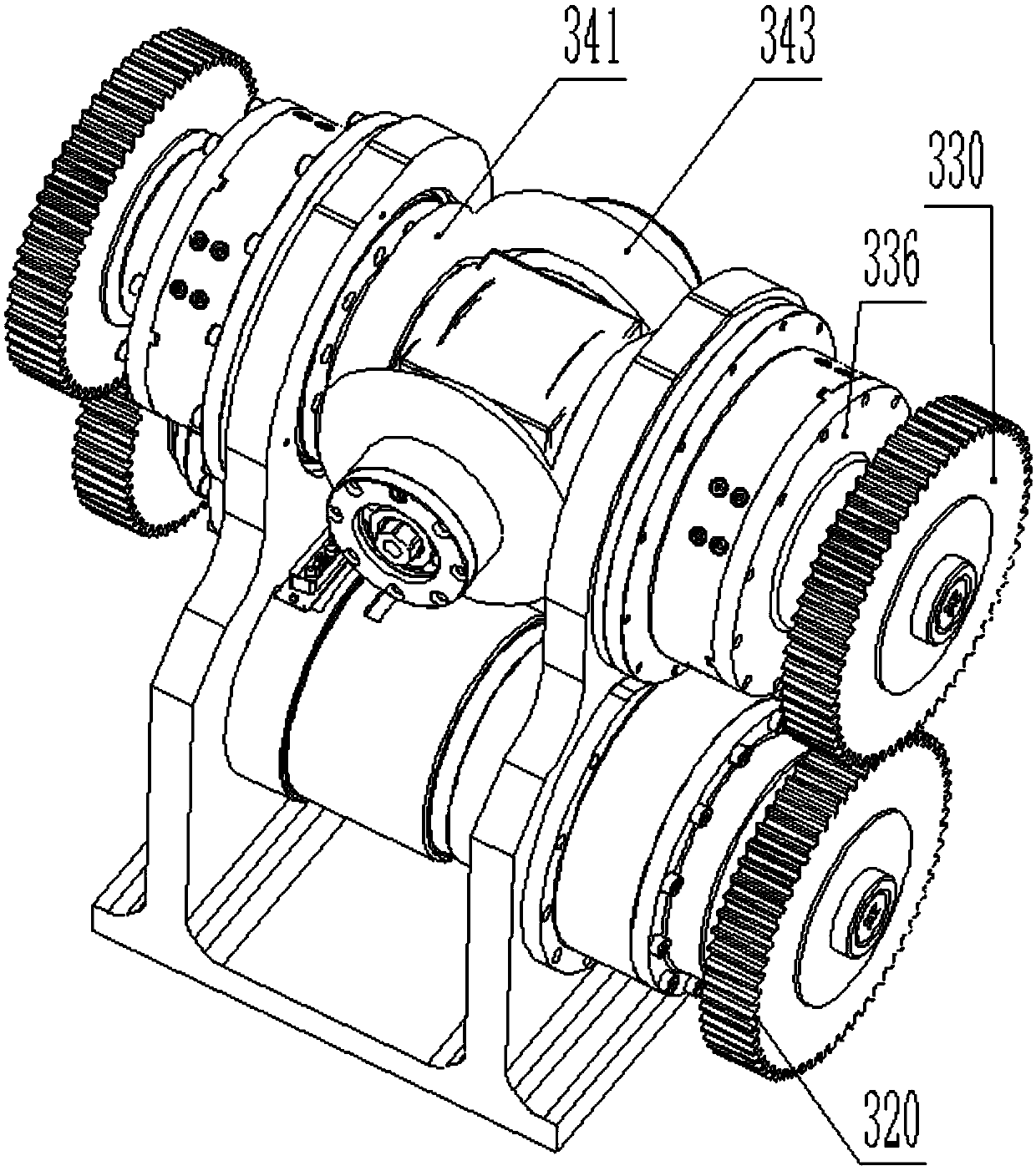
[0030] The purpose of the present invention is to provide a mechanical simulation device for seated lumbar spine manipulation training based on flexible differential drive to solve the above-mentioned problems in the prior art, to simulate the multi-directional movement of the waist, and to make it have a certain degree of safety and compliance.
[0031] In order to make the above objects, features and advantages of the present invention more comprehensible, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More