

Navigation method, device, equipment and system and storage medium
A navigation method and equipment technology, applied in directions such as navigation, measuring device, surveying and navigation, etc., can solve the problems of inability to know obstacles in time, reducing driving efficiency and traffic rate of self-mobile devices, and inability to plan optimal paths from mobile devices, etc. , to achieve the effect of improving driving efficiency and traffic rate and reducing conditional restrictions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0034] Figure 1A It is a flow chart of a navigation method in Embodiment 1 of the present application. The embodiment of the present application is applicable to the situation of performing route navigation on self-mobile equipment in a driving environment. The method is executed by a navigation device, and the device uses software and / or Realized by hardware, and specifically configured in electronic equipment, the electronic equipment may be a computer device or server with certain computing capabilities.
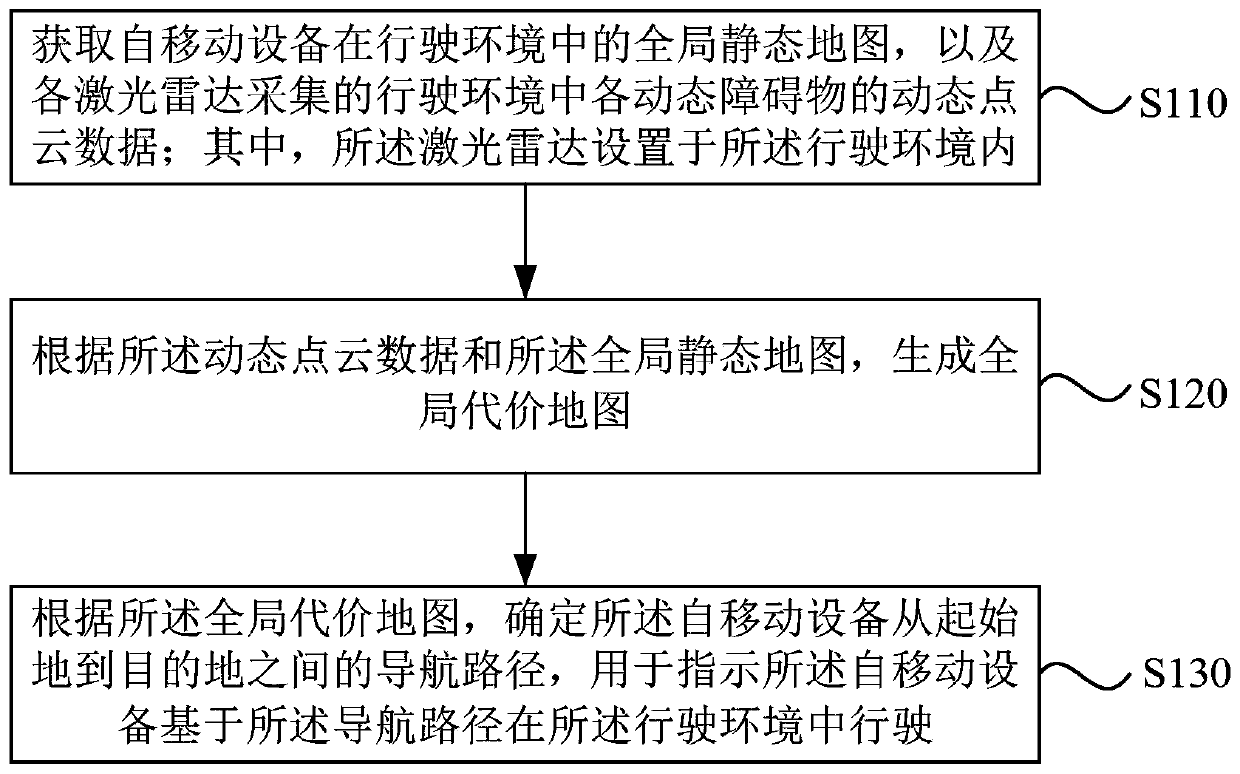
[0035] Such as Figure 1A One navigation method shown, including:
[0036] S110. Obtain from the global static map of the mobile device in the driving environment, and the dynamic point cloud data of each dynamic obstacle in the driving environment collected by each laser radar; wherein, the laser radar is set in the driving environment.
[0037] Among them, the autonomous mobile device can be a vehicle or a robot with an autonomous driving mode. When the autonomous mob...
Embodiment 2
[0070] Figure 2A It is a flow chart of a navigation method in Embodiment 2 of the present application. The embodiment of the present application is optimized and improved on the basis of the technical solutions of the foregoing embodiments.
[0071] Further, during the navigation process, add "when the self-mobile device is driving in the driving environment based on the navigation route, according to the local cost map corresponding to the predicted laser radar, the The driving path is adjusted; wherein, the predicted laser radar is located within the set range of the current area of the self-mobile device and is located in the untraveled path of the navigation path, so as to optimize the untraveled path of the navigation path.
[0072] Further, the operation "according to the local cost map corresponding to the predicted lidar, adjust the untraveled route in the navigation route" is refined into "according to the current position of the self-mobile device, determine the loc...
Embodiment 3
[0098] Figure 3A It is a flow chart of a navigation method in Embodiment 3 of the present application. The embodiment of the present application is optimized and improved on the basis of the technical solutions of the foregoing embodiments.
[0099] Further, the operation "according to the local cost map corresponding to the predicted lidar, adjust the untraveled path in the navigation route" is refined into "according to the local cost map of the predicted lidar, each local dynamic The motion information of the obstacle and the motion information of the self-mobile device, predict whether the dynamic obstacle and the self-mobile device will meet; according to the prediction result, adjust the untraveled path in the navigation route "to improve An optimization mechanism for optimizing untraveled paths.
[0100] Such as Figure 3A One navigation method shown, including:
[0101] S310. Obtain from the global static map of the mobile device in the driving environment, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More