

An industrial robot for pipe welding and its control method
An industrial robot and pipeline technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems that the inner wall of the pipeline is easy to slip, difficult to maintain stability, unable to move, etc., to achieve strong passability and improve passability , The effect of strong obstacle avoidance ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In the following description, numerous specific details are given in order to provide a more thorough understanding of the present invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced without one or more of these details. In other examples, some technical features known in the art are not described in order to avoid confusion with the present invention.
[0032] According to an embodiment of the present invention, an industrial robot for welding pipelines and a control method thereof are provided.
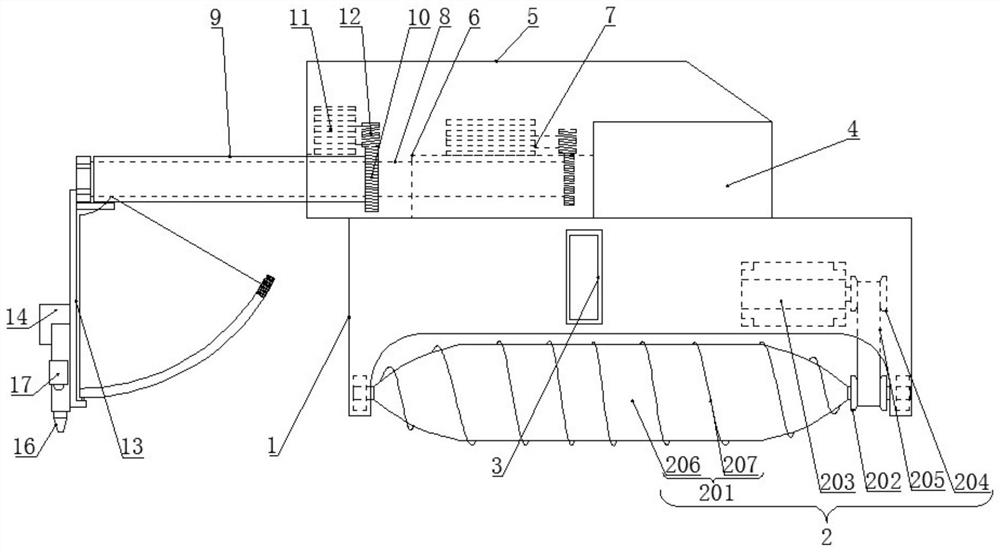
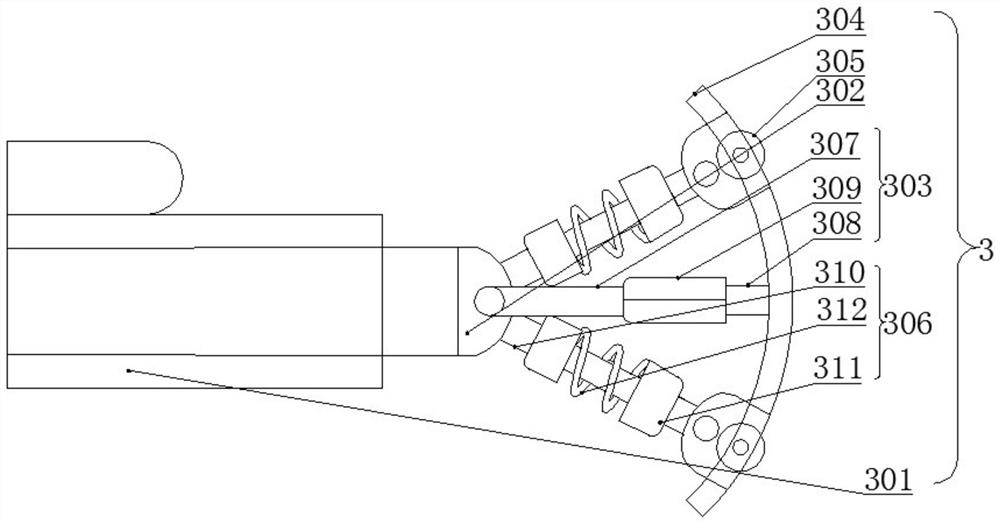
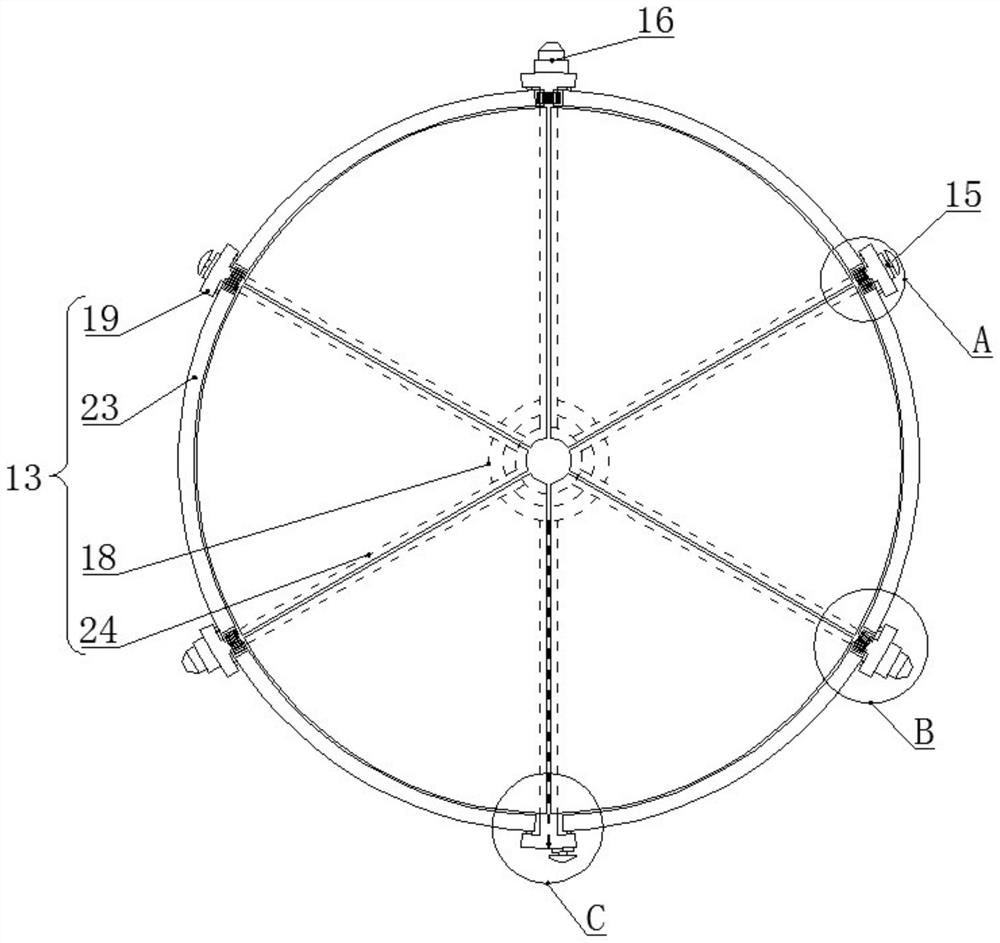
[0033] Such as Figure 1-8As shown, the industrial robot for pipeline welding according to the embodiment of the present invention includes a car body 1, the bottom of the car body 1 is provided with a traveling mechanism 2, and the side of the car body 1 is symmetrically provided with a lateral support mechanism 3, and the lateral support Mechanism 3 is arranged symmetrically on both sides of the vehicle body, whic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More