

A Neural Adaptive Fixed Time Control Method for Complex Teleoperation Technology
A technology with a fixed time and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of increasing the control cost of teleoperation technology, reducing the control cost of teleoperation technology, affecting the realization of goals of teleoperation technology, etc. problem, achieve the effect of strong adaptability to engineering demand, reduce control cost, and reduce control cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation of the present invention will now be described in detail with reference to the accompanying drawings.
[0081] Embodiments of the present invention provide a neural adaptive non-singular fixed-time control method for complex teleoperation technology; provide bilateral fixed-time tracking of HIL teleoperation system considering parameter uncertainties and external disturbances and complex mixed time delays, And by selecting the appropriate control gain and neural adaptive rate parameters to meet the control cost requirements of the master-slave robot.
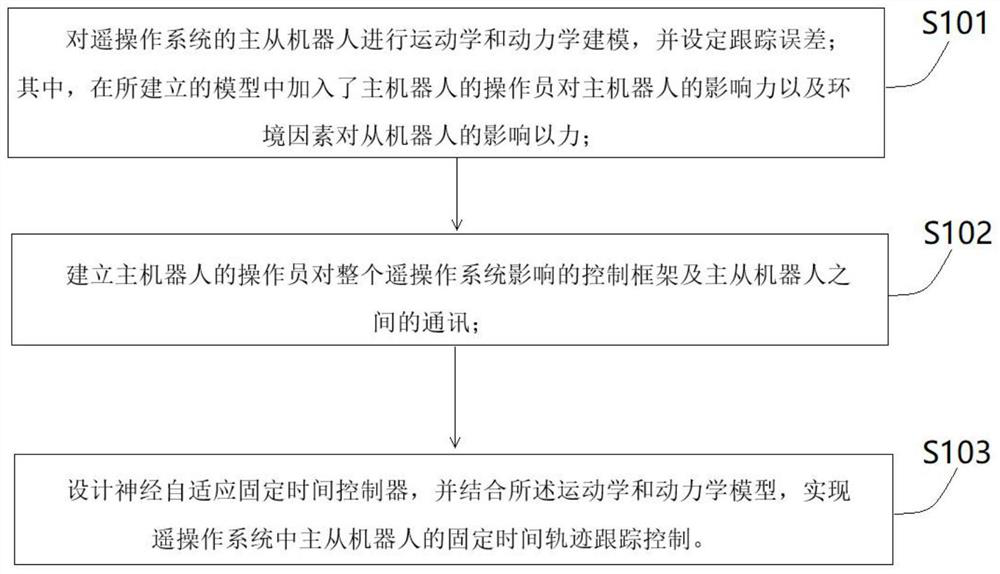
[0082] Please refer to figure 1 , figure 1 It is a flowchart of a neuro-adaptive non-singular fixed-time control method for complex teleoperation technology in an embodiment of the present invention, specifically comprising the following steps:
[0083] S101: Carry out kinematics...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More