

Automatic identification striking system and method for robot shooting confrontation match
An automatic identification and robotics technology, applied in the field of robotics, can solve problems such as blurred camera imaging, limited performance, and inability to achieve accurate distance measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0077] The invention provides an automatic recognition strike system for robot shooting confrontation competitions, which includes: enemy robots, our robots, front cameras, rear cameras, pan-tilts and gun barrels.
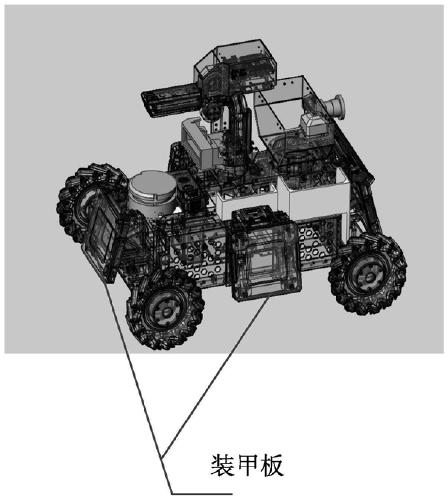
[0078] Armor plates are installed on the front, back, left, and right sides of the enemy robot, and light bars are set on both sides of the armor plate. The structure of the enemy robot is as follows: figure 1 shown.
[0079] The front camera is set in front of our robot, the rear camera is set behind our robot, the gimbal is our aiming device, and the barrel is our shooting device.
[0080] The rear camera is a USB wide-angle monocular camera, which is used to collect and detect images of enemy robots in the rear field of view. If an enemy robot is detected in the rear, it will control our robot to turn around.
[0081] The front camera is a Realsense RGB-D camera, which is used to collect images of enemy robots in the front field of view, and identify the armor ...
Embodiment 2
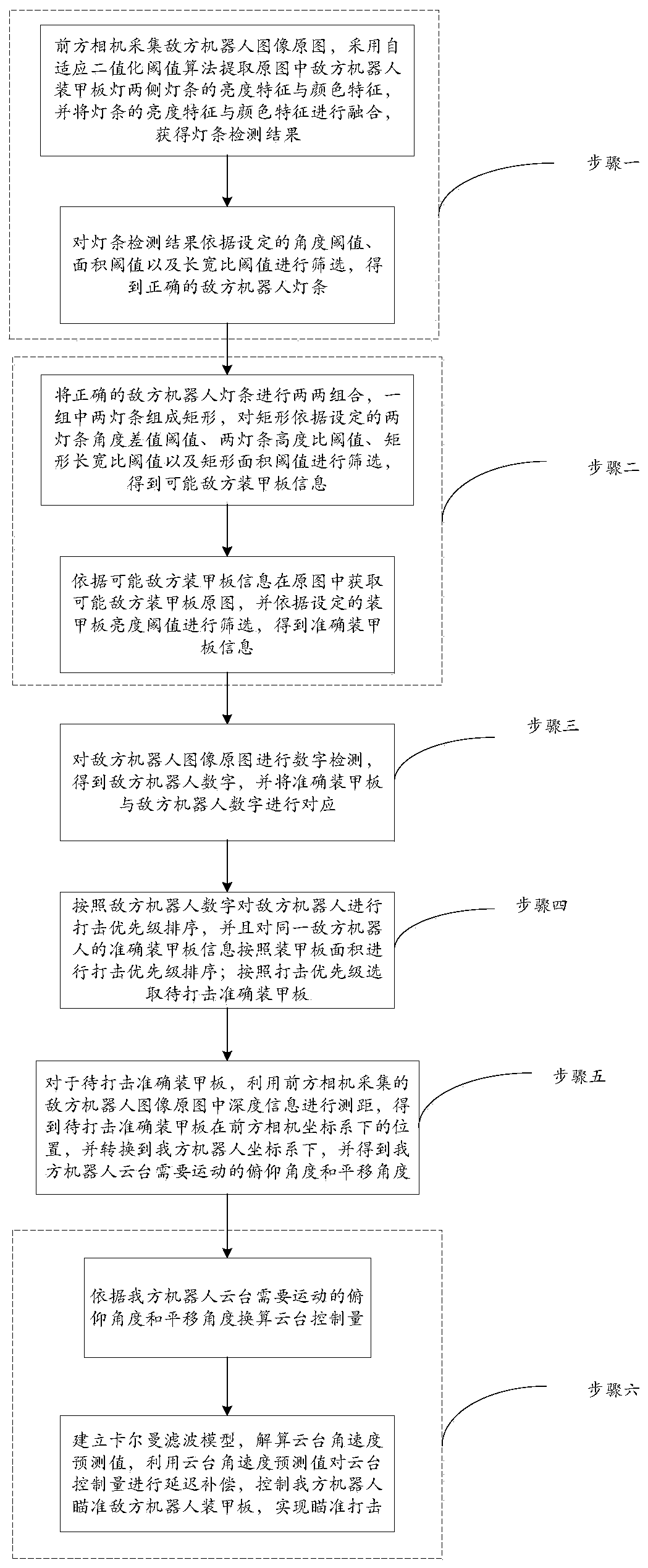
[0085] figure 2 It shows a method of automatic identification and attack for robot shooting confrontation competition provided by the embodiment of the present invention. In automatic identification, the method adopts an adaptive traditional algorithm by extracting the colors of the light bars on both sides of the enemy robot armor plate Information and brightness information detects the light bar, and detects the armor plate of the enemy robot through the position of the light bar and multiple logic conditions, so as to realize the identification of the enemy robot moving at high speed. At the same time, the edge features are obtained through edge extraction, and then the number on the armor plate of the enemy robot is recognized by the classifier, so as to provide the necessary identity information of the enemy robot for the decision-making algorithm. In automatic aiming and striking, the relative position of the enemy robot and our robot is calculated through the depth inf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More