

A kind of miniature magnetic drive capturing robot and its preparation method
A robot and robot body technology, applied in the direction of micro-manipulators, manipulators, manufacturing tools, etc., can solve the problem that it is difficult to have both controllability and grasping ability, and achieve the effect of good controllability and capture ability, and stable energy supply
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
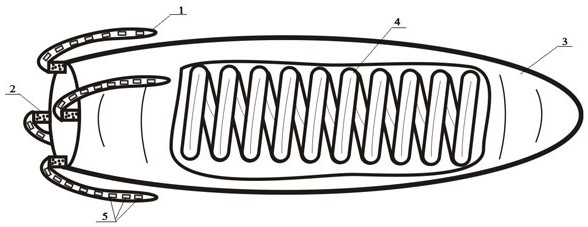
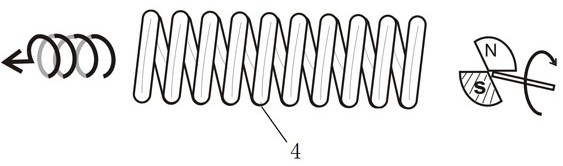
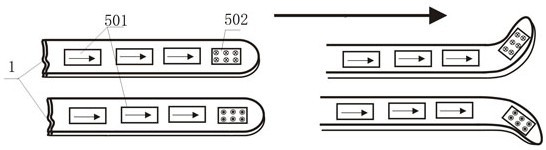
[0033] Such as Figure 1~3 As shown, a miniature magnetic drive capture robot includes a robot body 3, a number of connecting synapses 2 are arranged at the end of the robot body 3, and the material of the robot body 3 is an organic polymer such as polydimethylsiloxane (PDMS) or Polymethyl methacrylate (PMMA), the connecting synapse 2 is a rigid structure integrated with the robot body 3, the connecting synapse 2 is connected with the capture arm 1, the material of the capture arm 1 is a flexible arm made of flexible material, the capture arm 1 Flexible polydimethylsiloxane PDMS can be selected, and several magnetic sheets 5 are distributed at intervals in the capture arm 1, and at least two magnetic sheets 5 with different magnetization orientations are distributed in the capture arm 1. In this embodiment, as image 3 As shown, the magnetic sheet 5 includes a parallel magnetic sheet 501 and a vertical magnetic sheet 502, the magnetization orientation of the parallel magnetic ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More