

Fuzzy self-adaptive attitude control method for tail-push type double-duct unmanned aerial vehicle
A fuzzy self-adaptive, attitude control technology, applied in the direction of self-adaptive control, attitude control, general control system, etc., can solve the problems of harsh vibration environment, high use and maintenance costs, fuel and power consumption, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
[0042] Fuzzy adaptive control is a control method based on errors to eliminate errors, and does not depend on precise mathematical models. It is suitable for solving controlled objects with strong coupling, nonlinearity, and difficulty in accurate modeling such as tail-push double-ducts. control problem.
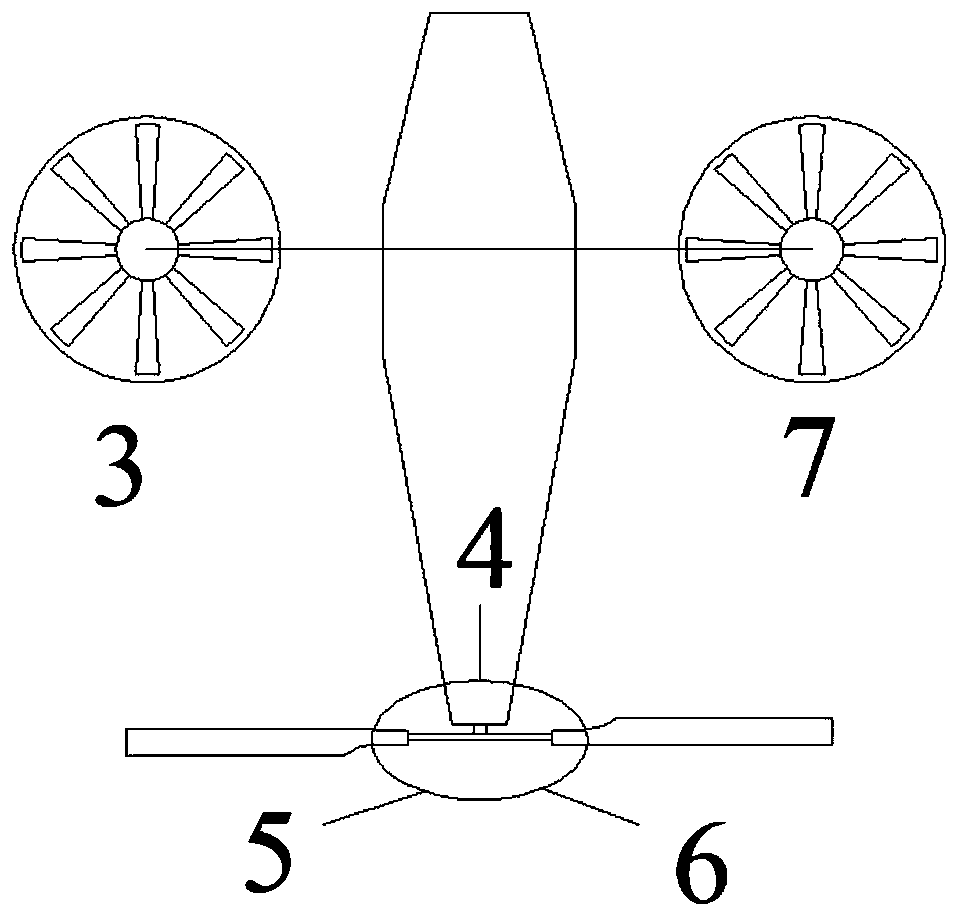
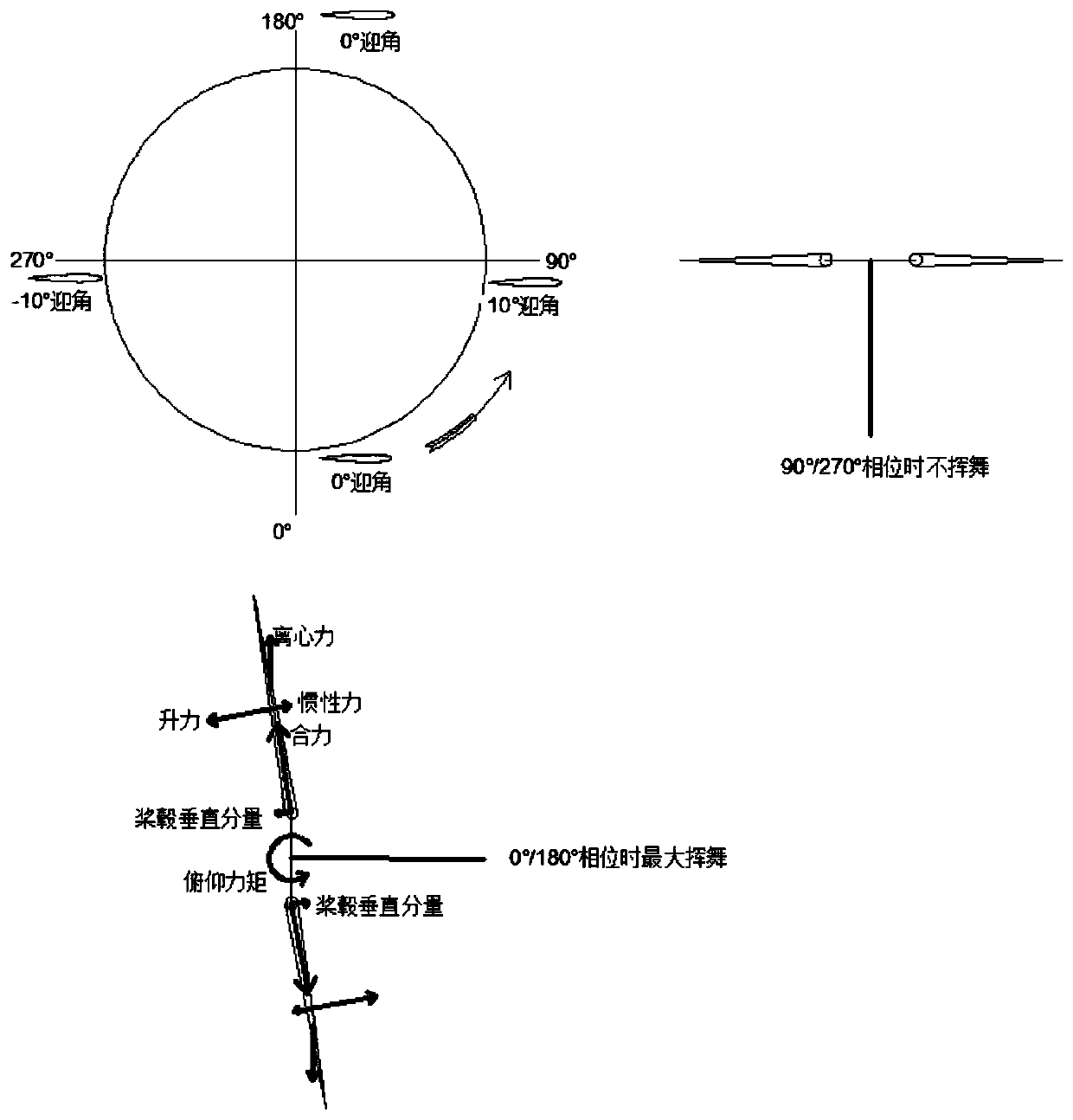
[0043] The present invention proposes an advanced attitude control method for a tail-thrust double-duct vertical take-off and landing UAV. Two ducts are designed on both sides of the center of gravity of the aircraft to provide the main lift of the aircraft and achieve roll through the differential speed of the ducts. Control, the tail rotor generates pitch and heading control moments through longitudinal and lateral periodic pitch changes, and ge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More