

A parallel troweling robot and its control method
A robot and parallel technology, applied in the direction of architecture, building structure, etc., can solve problems such as inability to adjust in real time, and achieve the effects of not being easy to interfere, reducing the number, and controlling decoupling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings, so as to better understand the purpose, features and advantages of the present invention. It should be understood that the embodiments shown in the drawings are not intended to limit the scope of the present invention, but only to illustrate the essence of the technical solutions of the present invention.
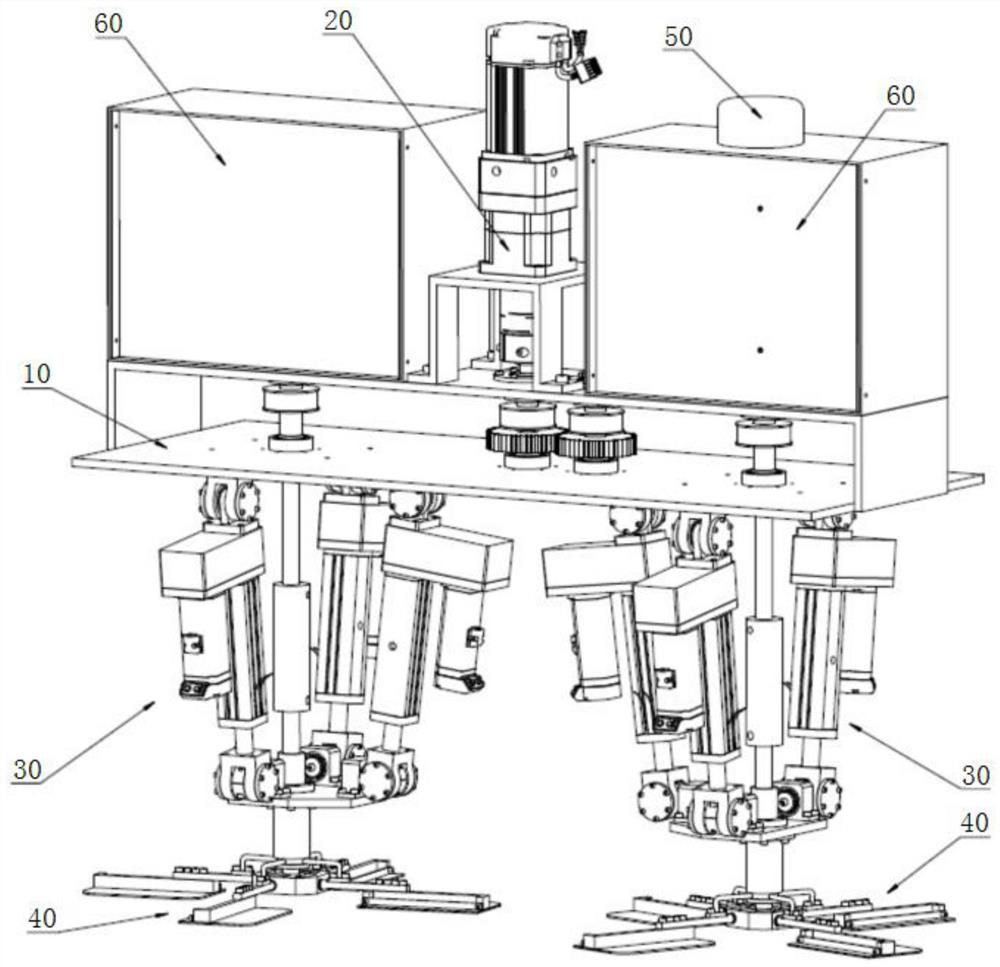
[0028] Such as figure 1 As shown, the parallel troweling robot provided by the present invention includes a frame 10 , a trowel rotating drive mechanism 20 , a trowel adjustment mechanism 30 and a trowel 40 . The wiper rotating drive mechanism 20 , the two wiper adjustment mechanisms 30 and the two wiper mechanisms 40 are all installed on the frame 10 , and the wiper rotation drive mechanism 20 is simultaneously associated with the two wiper plates 40 for driving the two wiper plates 40 to rotate. The free ends of the two wiper adjustment mec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More