

Sum-difference tracking angle measurement method capable of resisting main and side lobe interference and based on block parallel SMI algorithm
A main and side lobe, angle measurement technology, applied in the field of signal processing, can solve performance interference, influence, failure and other problems, achieve the effect of good angle measurement accuracy, reduce the amount of calculation, and improve the angle measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
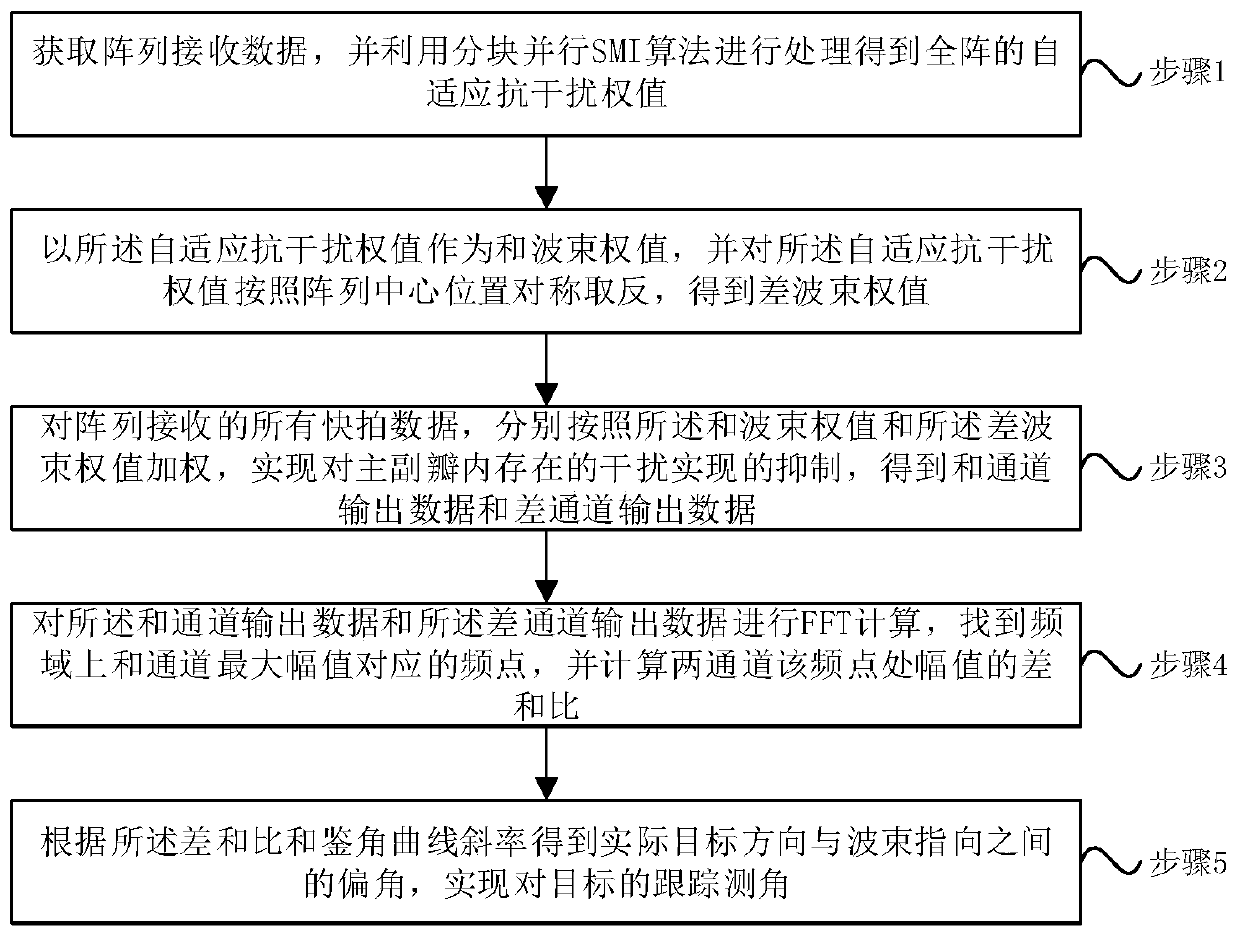
[0051] See figure 1 , figure 1 It is a schematic flow chart of a sum-difference tracking angle measurement method based on block parallel SMI algorithm against main and side lobe interference provided by an embodiment of the present invention, including:
[0052] Step 1: Obtain the received data of the array, and use the block parallel SMI algorithm to process to obtain the full array adaptive anti-jamming weight.
[0053] In this embodiment, the phased array radar obtains the data received by the array, combines with the estimated angle of the target, and uses a block parallel SMI algorithm to obtain an adaptive anti-jamming weight.
[0054] Further, step 1 includes:
[0055] (1a) Blocking the received data to obtain several sub-data blocks;
[0056]Specifically, for the received data x(t), t=1, 2,...,L, the number of array elements is N, L is the number of snapshots, the size of the received data is N×L, and the uniform block method is used to The received data x(t) is d...
Embodiment 2
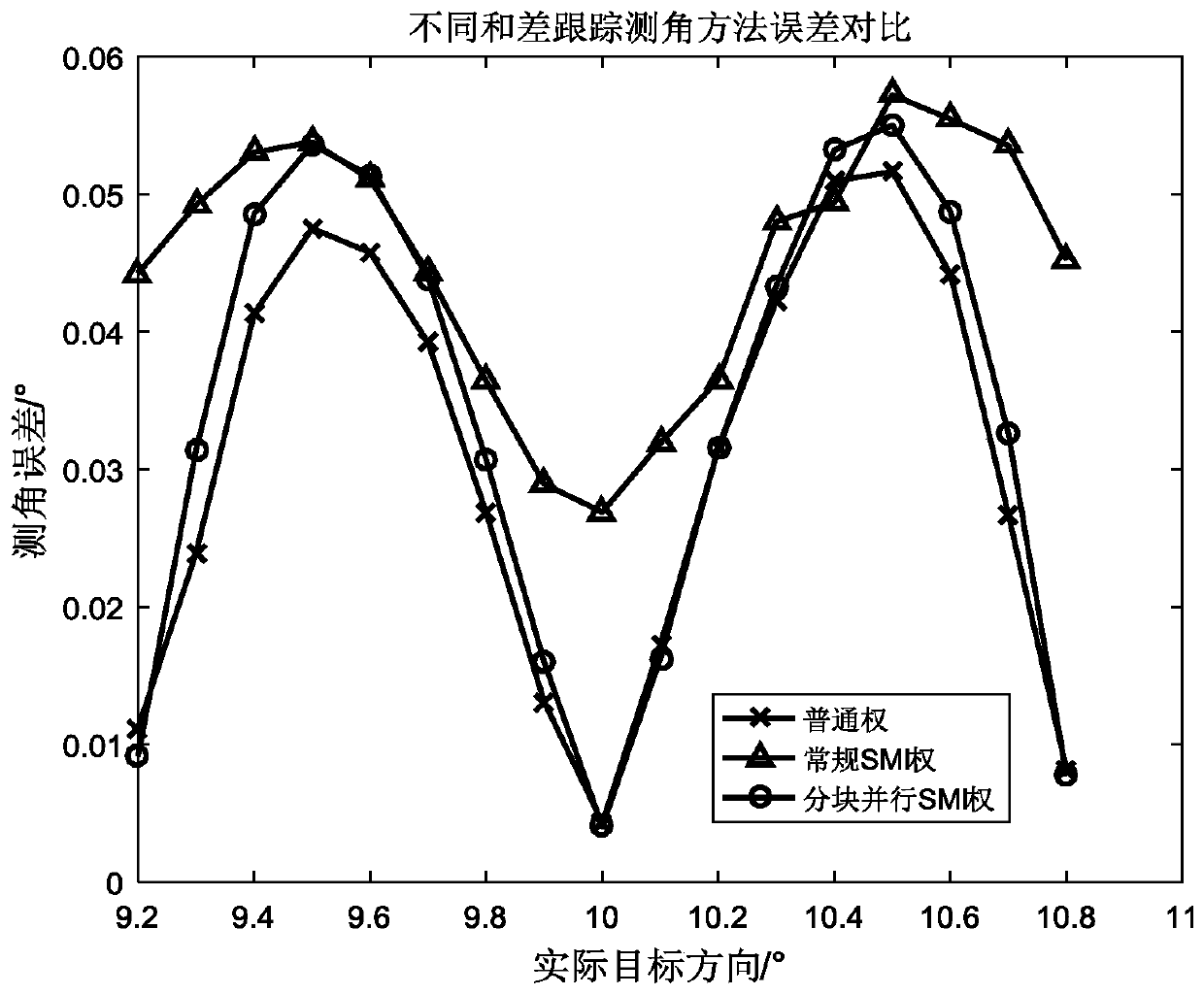
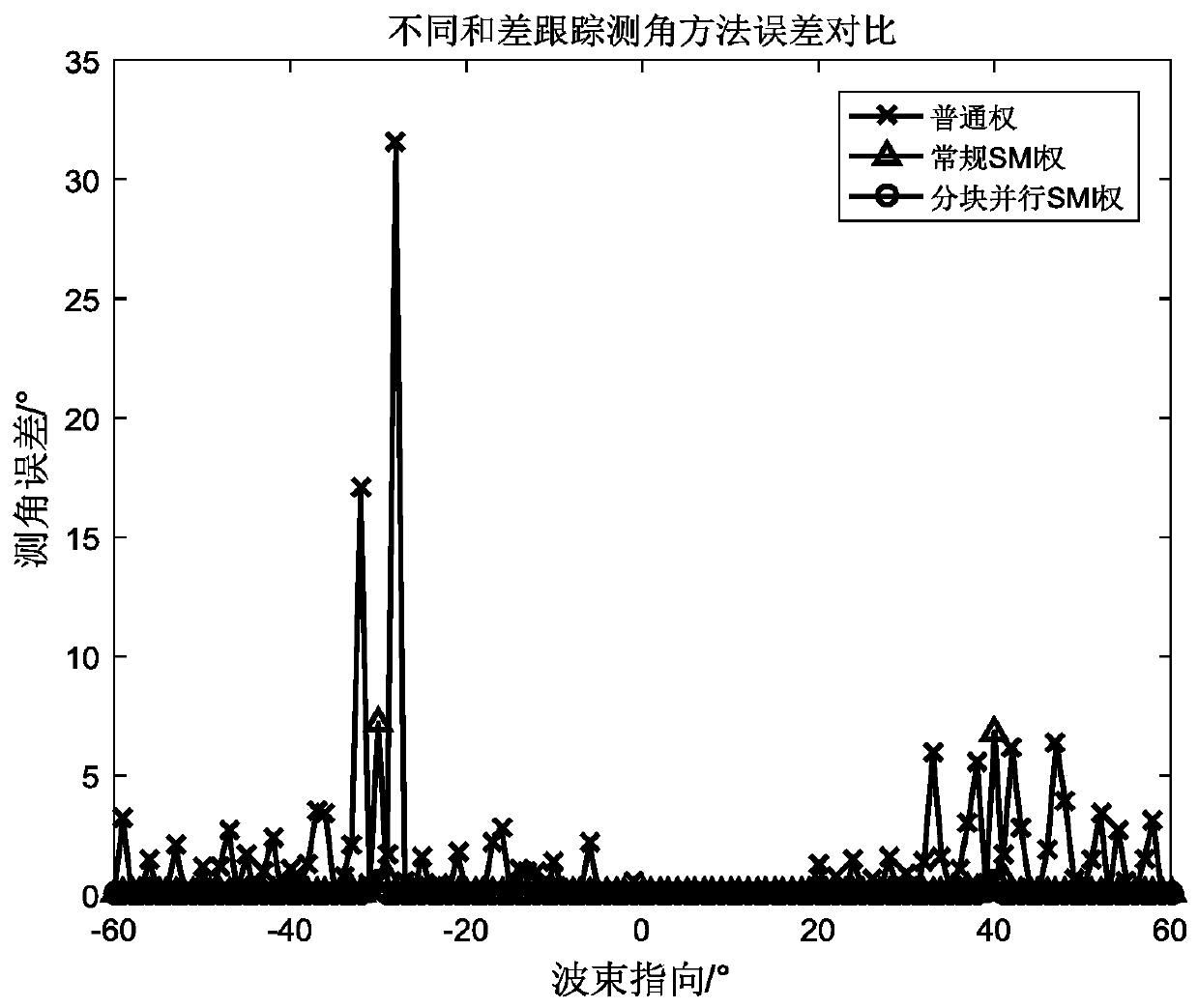
[0104] The effects of the present invention will be further described through simulation experiments below.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More