

A method of robot simulating the main dynamic state of human limb muscles
A robot and human body technology, applied in the field of robot simulation, can solve problems such as the influence of learning progress, the systematicness of learning effect, the lag of learning and mastering timing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
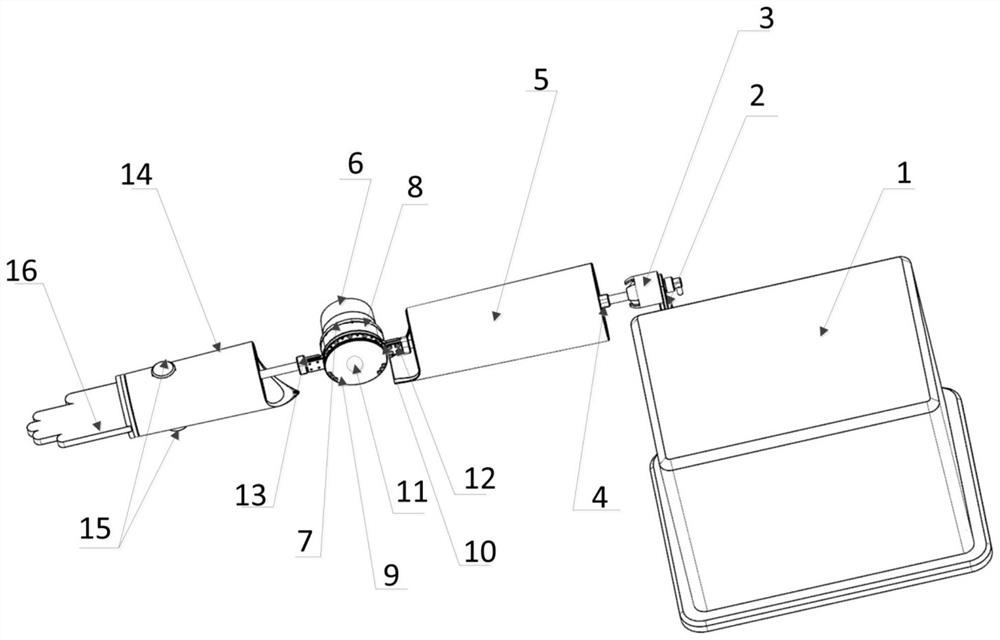
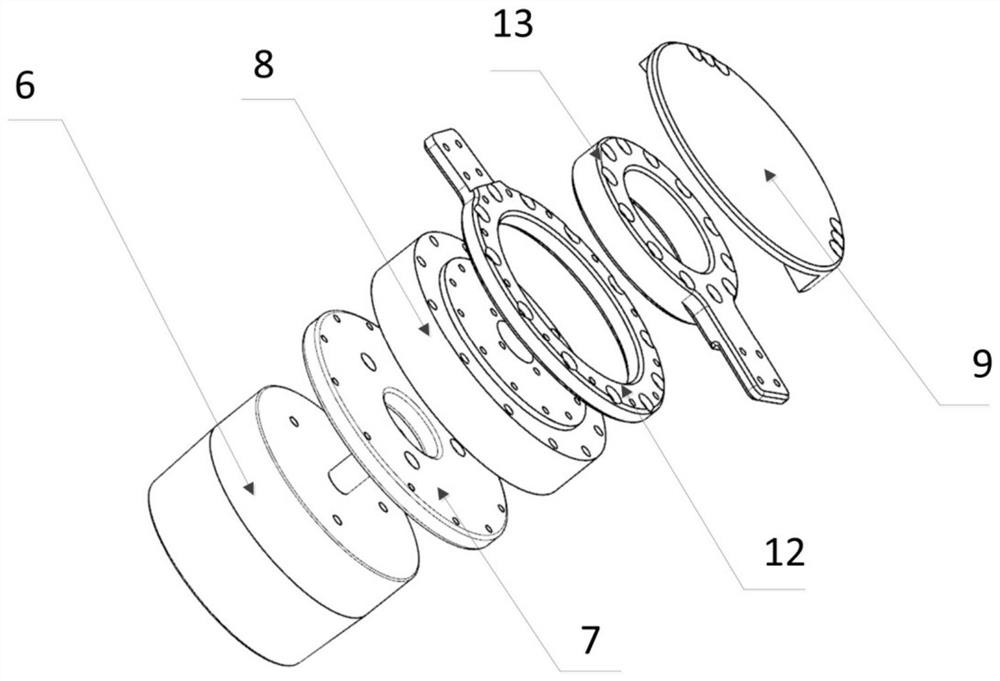
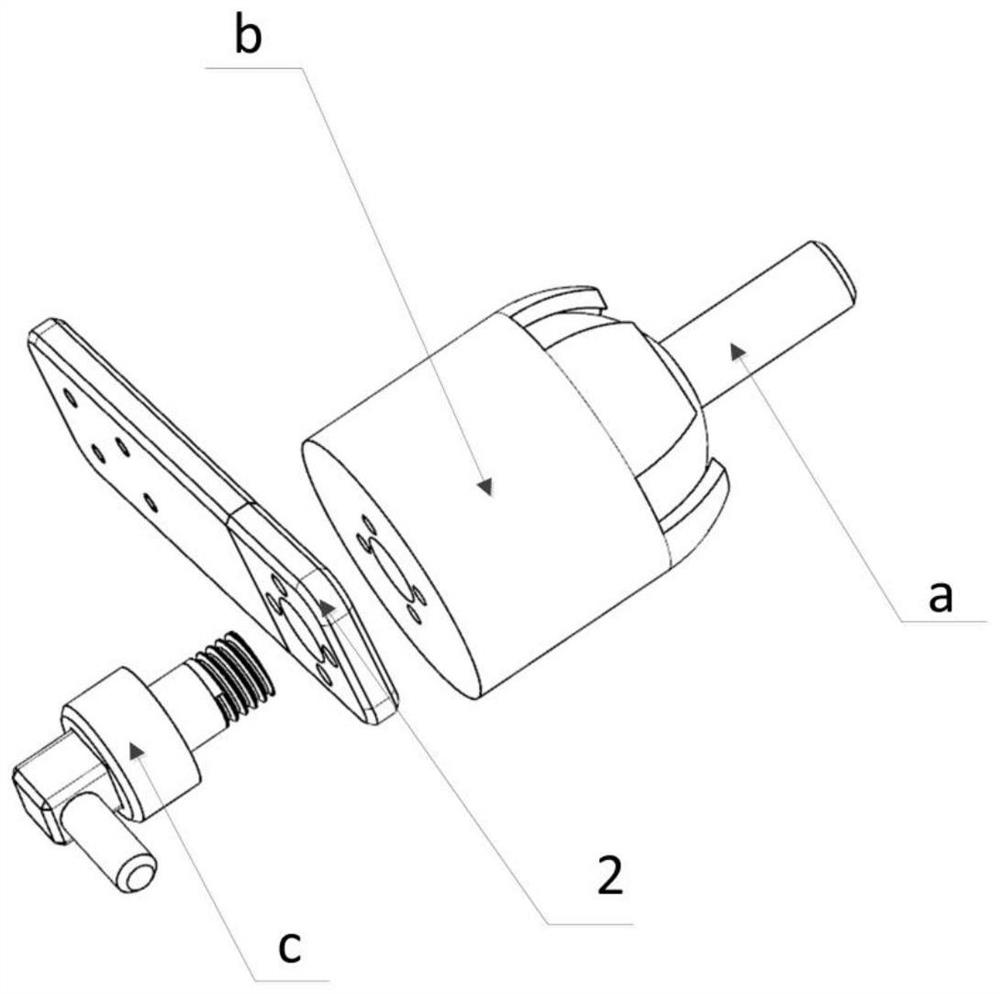
[0066] refer to Figure 1 ~ Figure 4 , the present embodiment provides a robot for simulating the main dynamic state of the muscles of the limbs of the human body, comprising a base 1, a shoulder joint assembly, a large arm 5, an elbow joint assembly, a forearm 14 and a palm 16; the shoulder joint assembly includes a shoulder joint fixation Part 2 and the shoulder joint movable part 3, one end of the shoulder joint fixed part 2 is fixed on the base, the other end is connected to the shoulder joint movable part 3, the shoulder joint movable part 3 is fixedly connected with the upper arm 5 and can drive the upper arm to rotate in all directions The elbow assembly includes a drive motor 6 and a motor reducer 8, the input end of the motor reducer 8 is connected to the drive motor 6, the boom 5 and the small arm 14 are located on both sides of the output shaft end of the motor reducer, and the motor reducer 8 is fixed on On the big arm 5, the motor reducer 8 drives the small arm 14...
Embodiment 2
[0077] refer to Figure 5 to Figure 9 In the following, the method for simulating the elbow flexion muscle strength of the human body at different levels by the robot shown in Embodiment 1 is taken as an example to illustrate the method for the robot of the present invention to simulate the main dynamic state of the muscles of the limbs of the human body.
[0078] First of all, it needs to be explained that in the exercise of simulating muscle strength of various grades of elbow flexion, the joints of the upper limbs can only be performed after the operator places them in the initial position, and by adjusting the universal joint ball joint connecting rod 3 of the shoulder joint movable part Damping immobilizes the shoulder, i.e. the shoulder joint remains stationary during movement.
[0079] The shoulder joint rotation angle is detected and displayed by the gyro sensor 4 , the elbow joint rotation angle is detected and displayed by the angle sensor 11 , and the resistance app...
Embodiment 3
[0093] refer to Figure 5 to Figure 9 In the following, the method for simulating the elbow muscle strength of different levels of the human body by the robot shown in Embodiment 1 is taken as an example to illustrate the method for the robot of the present invention to simulate the main dynamic state of the muscles of the limbs of the human body.
[0094] First of all, it needs to be explained that in the exercise of simulating muscle strength of various grades of elbow extension, the joints of the upper limbs can only be performed after the operator places them in the initial position, and by adjusting the universal joint ball joint connecting rod 3 of the shoulder joint movable part Damping immobilizes the shoulder, i.e. the shoulder joint remains stationary during movement.
[0095] The rotation angle of the shoulder joint is detected and displayed by the gyro sensor 4 , the rotation angle of the elbow joint is detected and displayed by the angle sensor 11 , and the resist...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More