

Modular unmanned vehicle positioning method and system based on visual inertia laser data fusion
A technology of data fusion and positioning method, which is applied in radio wave measurement system, image data processing, photo interpretation and other directions, and can solve the problems that the robustness and accuracy cannot guarantee the application requirements, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
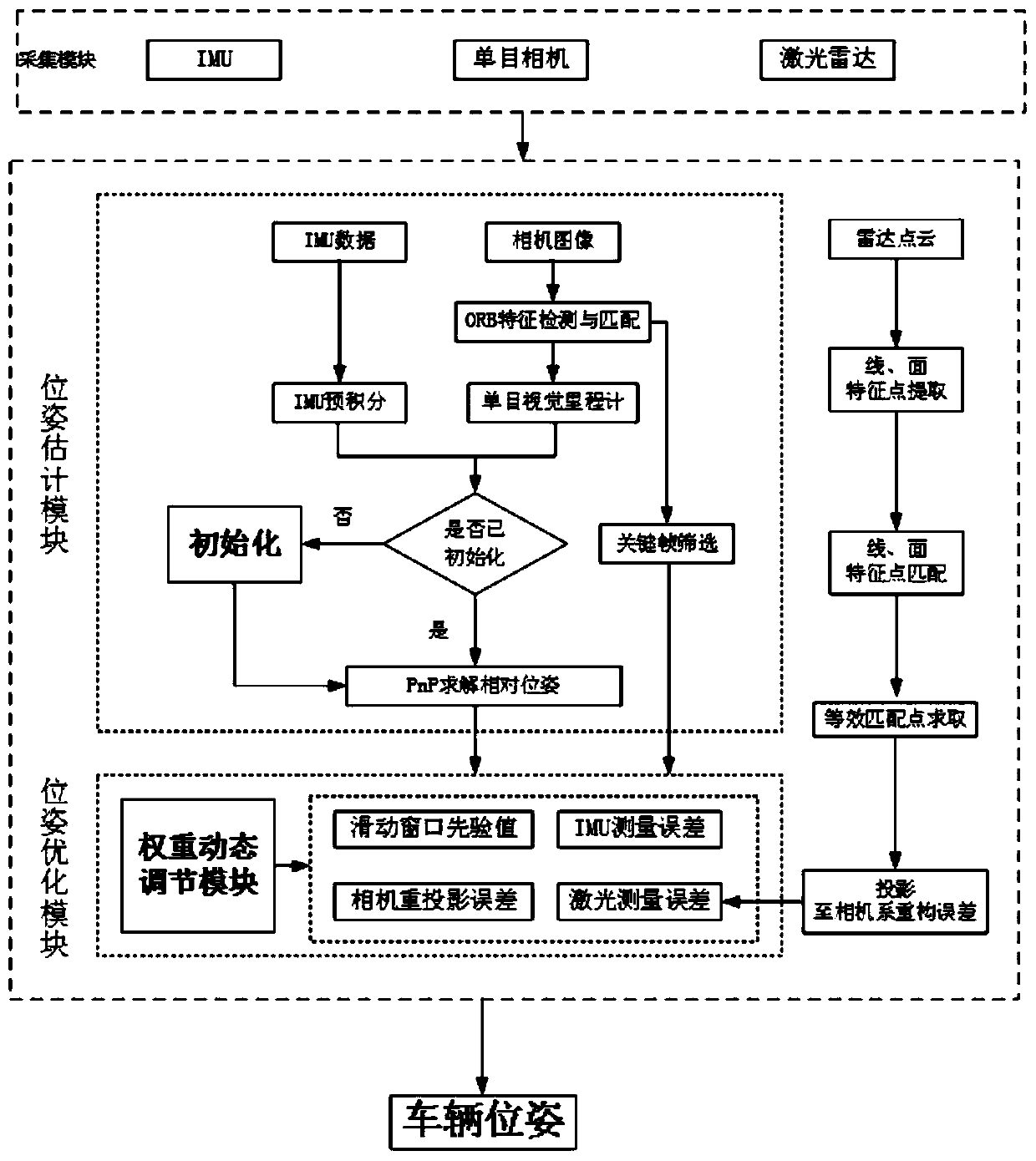
[0088] like figure 1 As shown, a modular unmanned vehicle positioning system based on visual inertial laser data fusion. The sensors involved in the acquisition module include IMU, laser radar, and monocular camera. The real-time detection data of the three sensors are transmitted to the processing module in the system for processing. The system carries out a separate design of multiple modules. The pose estimation module solves the scale problem of the monocular visual odometer through the joint initialization of the IMU and the monocular camera; the pose optimization module accepts the pose information from the pose estim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More